

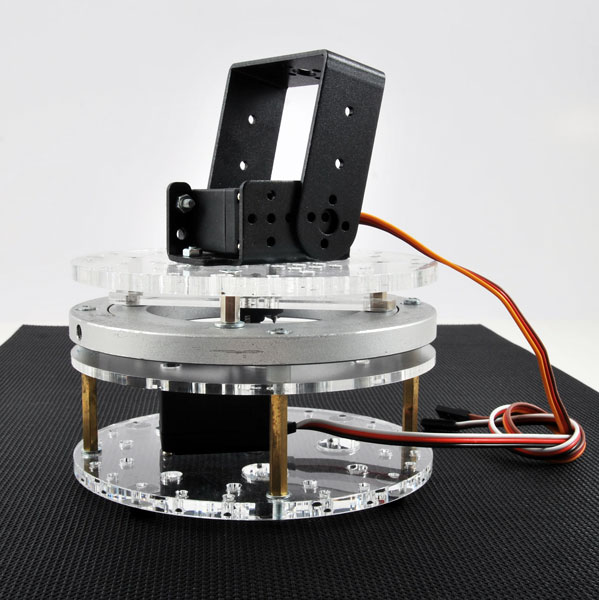
La base rotante per servo presentata in questo articolo è realizzata in plexiglass tagliato mediante l’utilizzo del LASER, si trova in vendita presso il sito di Futura Elettronica.
La rotazione è fornita da un servomotore a rotazione continua con dimensioni standard.
Questa potrà essere utilizzata per esempio per effettuare riprese di componenti posti sulla sua superficie.
![]() Citazione dell’articolo nelle sezioni ARDUINO, ARTICOLI, PROGETTI, ROBOTICA, SLIDESHOW del Blog di Elettronica In
Citazione dell’articolo nelle sezioni ARDUINO, ARTICOLI, PROGETTI, ROBOTICA, SLIDESHOW del Blog di Elettronica In

Indice
Descrizione
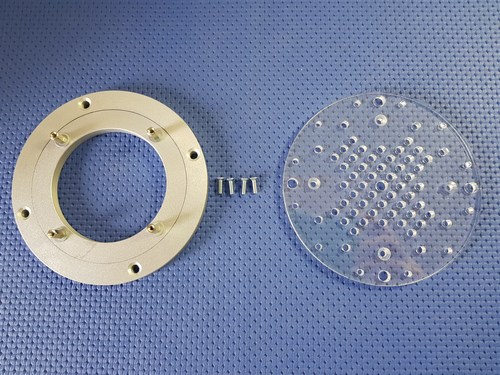
I componenti principali della base rotante per servo sono realizzate in plexiglass tagliato mediante l’utilizzo del LASER.
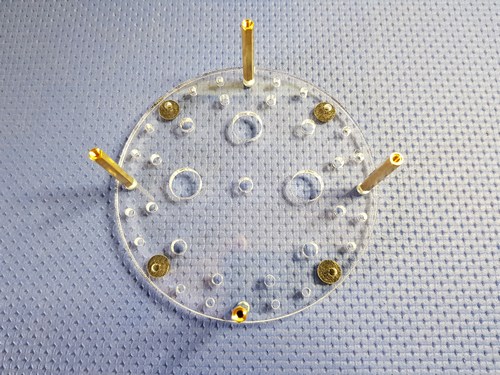
È composta da due piastre in plexiglass con diametro 120 mm e 5 mm di spessore, una con diametro 120 mm e 3 mm di spessore, trascinatore in plexiglass per il montaggio del servo RC, una ralla in lega di alluminio con cuscinetto a una fila di sfere in acciaio (diametro interno: 70 mm – diametro esterno: 120 mm).
Le due piastre di base sono fissate mediante quattro distanziali esagonali lunghi 40 mm, mentre quattro distanziali esagonali lunghi 10 mm separano la ralla dalla piastra superiore.
Nella parte inferiore sono presenti quattro piedini adesivi. Il tutto è fissato mediante viti e rondelle di vari diametri e lunghezze.
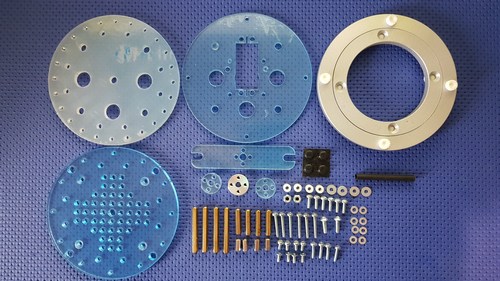
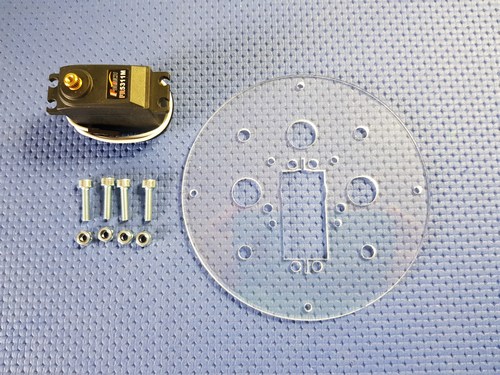
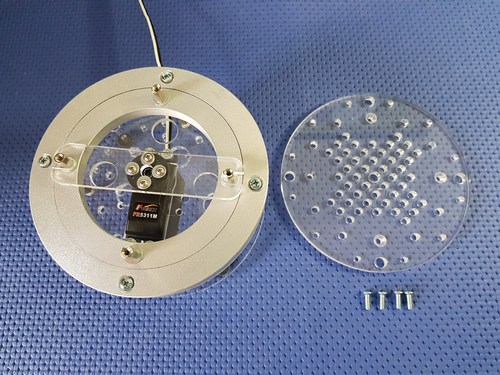
Nella foto è visibile il contenuto del kit 7300-ROTATINGBASE-ST, simile al 7300-ROTATINGBASE.

Elenco componenti del kit
| Quantità | Descrizione |
|---|---|
| 1 | Cerchio di base di plexiglass tagliato a laser ø120x5 mm |
| 1 | Cerchio intermedio di plexiglass tagliato a laser ø120x3 mm |
| 1 | Cerchio superiore di plexiglass tagliato a laser ø120x5 mm |
| 1 | Lista di plexiglass tagliata a laser per il fissaggio del servo |
| 1 | Cuscinetto a sfere in alluminio, foro interno 70 mm, Diametro esterno 120 mm, spessore 7 mm |
| 4 | Piedini in gomma autoadesivi |
| 4 | Distanziali in metallo HEX F7F M3x40 |
| 4 | Distanziali in metallo HEX F/F M3x10 |
| 4 | Distanziali in ABS 3x5 mm |
| 4 | Viti M3x20 TB a croce |
| 4 | Viti M3x12 TB a croce |
| 4 | Viti M3x6 TSEI |
| 4 | Viti M3x10 TSEI |
| 4 | Viti M4x12 TBEI |
| 4 | Dadi M4 autobloccanti |
| 4 | Rondelle piane 3x7 |
| 4 | Rondelle piane 3x9 |


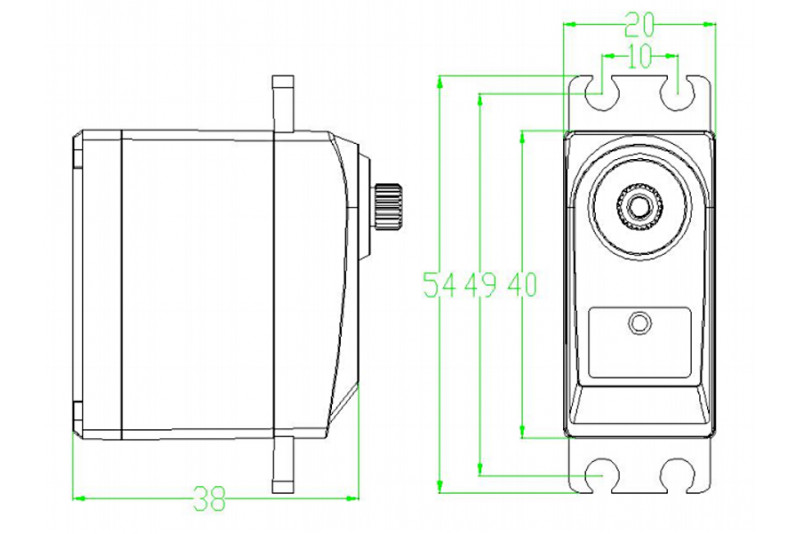
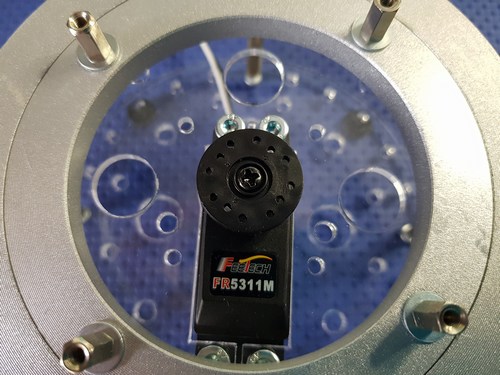
Servomotore utilizzato
Il servomotore utilizzato è il modello FR5311M di tipo digitale, che permette due modalità di funzionamento: modalità servo e modalità di rotazione a 360 gradi; la tensione di funzionamento è compresa tra i 4.8V-8.4V; gli ingranaggi interni sono in metallo.
Caratteristiche
Velocità : (7.4V) 0.11 sec / 60 °, (6V) 0,13 sec / 60 °, (4.8V) 0.15 sec / 60 °,
Coppia : (7.4V)13,8 kg-cm , (6V) 12,5 kg-cm, (4.8V): 10kg-cm
Larghezza della banda morta: 2 us
Lunghezza del filo: 30cm

Dove trovare Base Rotante in Plexiglass?
Il kit della Base Rotante in Plexiglass può essere acquistato presso il sito FUTURA ELETTRONICA, il codice prodotto è 7300-ROTATINGBASE.
 Il suo costo, al momento della pubblicazione di questo articolo, è di 23,00 €.
Il suo costo, al momento della pubblicazione di questo articolo, è di 23,00 €.
Nel kit, non è compreso il servomotore. Nel caso potete utilizzare il servomotore, venduto sempre da FUTURA ELETTRONICA, quello consigliato è un Servo analogico 11 kg•cm -con ingranaggi in metallo
Codice Prodotto: 1606-MG996R al costo, al momento della pubblicazione di questo articolo è di 9,00 €.

Altra versione della base Rotante
Presso lo stesso sito è disponibile il kit della Base Rotante in Plexiglass per Stepper Motor, il kit è simile alla Base Rotante in Plexiglass, ma in questo caso la rotazione viene effettuate mediante un motore passo passo.
In suo codice prodotto è 7300-ROTATINGBASE-ST, mentre il suo costo, al momento della pubblicazione di questo articolo, è di 29,50 €.

 Il kit è venduto senza il motore passo passo, il quale deve essere acquistato a parte. Sono possibili due alternative.
Il kit è venduto senza il motore passo passo, il quale deve essere acquistato a parte. Sono possibili due alternative.
Motore passo-passo bipolare NEMA 17 – 1,5 A, Codice Prodotto: 2846-STEPMOT03 al costo di 18,00 €.
Oppure Stepper Motor 5 fili + Driver con ULN2003, codice Prodotto: 2846-SM2003DB, al costo di 5,50 €.

![]()
Fasi del montaggio
Per il montaggio della base rotante ci si potrà riferire alle istruzioni presenti nel file di istruzioni
Montaggio disco di base
Si inizia rimuovendo da tutte le parti in plexiglass la pellicola protettiva, e dopo aver preso la base in plexiglass da 5 mm visibile nell’immagine seguente, si applicheranno i 4 piedini adesivi.
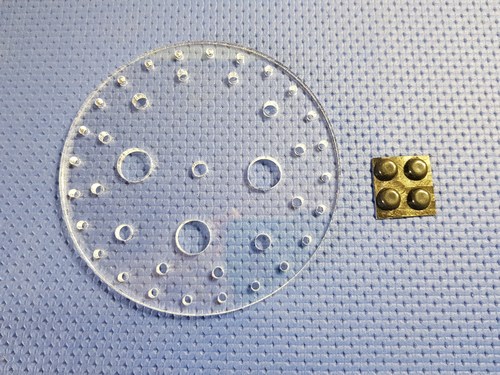
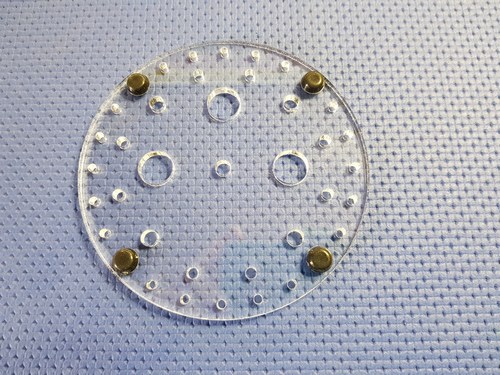
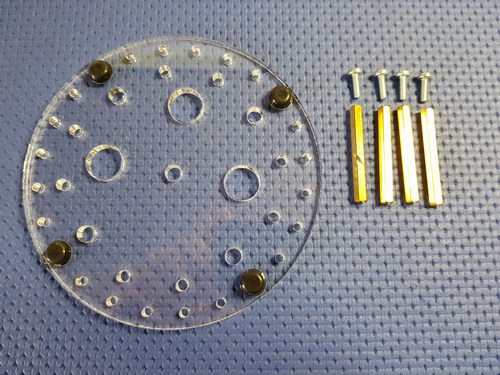
Con i piedini orientati verso il basso, si fisseranno poi alla base i 4 distanziali esagonali HEX M3x40 mediante altrettante viti M3x10 TB a croce, non serrando troppo le viti onde evitare di incrinare il plexiglass.
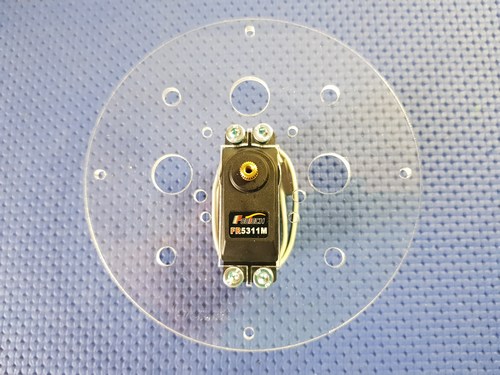
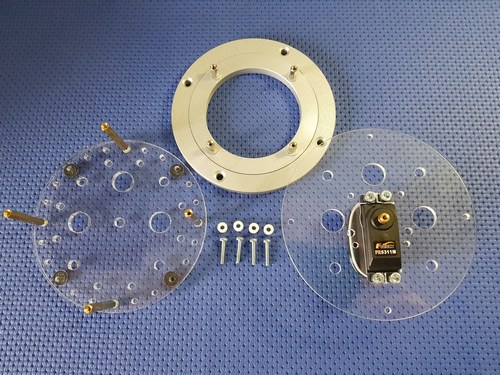
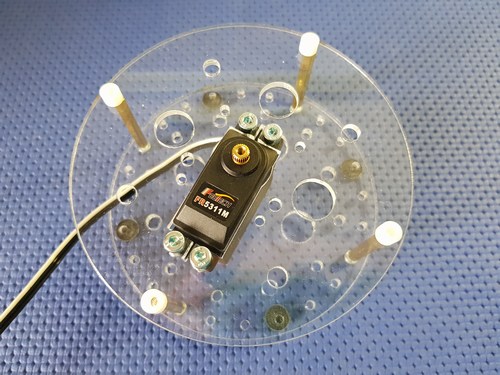
Montaggio del servomotore
Si fisserà quindi il servomotore alla piastra in plexiglass mediante
4 viti M4x12 TBEI e 4 dadi autobloccanti M4.
Nota: avvitare i dadi fino a sfiorare la piastra quindi stringerli poco per volta e in sequenza in modo da consentire l’auto centraggio del servo sulla piastra.
Anche in questo caso non serrare troppo le viti onde evitare di incrinare il plexiglass!
Montaggio della ralla
Ora prendere la ralla da 4” in alluminio ed asportare gli otto tappi in plastica presenti a protezione dei fori


quindi infilare nei 4 fori della corona interna (lato svasato) 4 viti M3x12 TB a croce
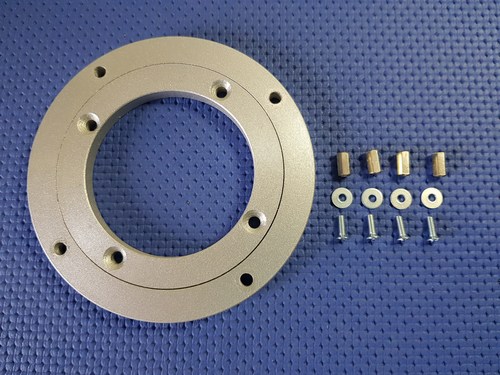
Ora infilare su ciascuna vite una rondella piana 3×9 e di seguito avvitare a mano fino in fondo un distanziale esagonale M3x10.

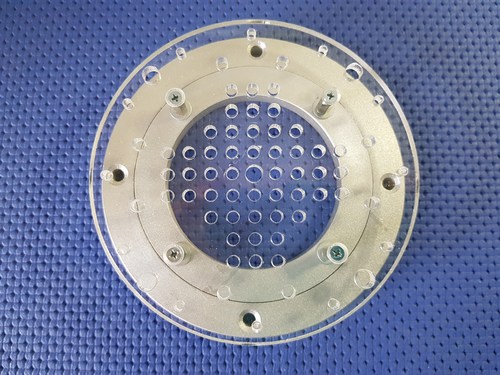
La prossima operazione serve per allineare i distanziali con i fori del piatto in plexiglass da 3 mm e centrare il piatto sulla ralla. Appoggiare quindi sui distanziali il piatto in plexiglass da 5 mm con i fori svasati rivolti verso l’alto quindi inserire nei distanziali ed avvitare fino in fondo 4 viti M3x8 TSEI.
A questo punto stringere a fondo le 4 viti precedentemente avvitate nei distanziali in modo da bloccarli in posizione.
Assemblaggio finale
Rimuovere il piatto in plexiglass svitando le 4 viti di fissaggio a testa svasata per poter proseguire con il montaggio degli altri elementi: la base, la ralla intermedia e la piastra con il servomotore
Appoggiare un distanziale in ABS 3×5 su ciascuno dei 4 fori di fissaggio della piastra motore.
Inserire nei 4 fori della corona esterna della ralla (dal lato della svasatura) 4 viti M3x20 TB a croce.
Adagiare la ralla sulla base inserendo le viti nei fori dei distanziali in ABS, in quelli della piastra motore ed infine in quelli filettati dei distanziali esagonali in ottone.
Per centrare la ralla con il resto della struttura, è necessario puntare prima tutte e 4 le viti e di seguito stringerle gradualmente e in successione.

Recuperare l’HUB in dotazione del servo e la relativa vite di fissaggio

E fissarlo sull’albero del servo
Recuperare il trascinatore in plexiglass da 3 mm , 4 viti autofilettanti 2,5×10 TB a croce complete di rondella piana 3×6

Posizionare il trascinatore in plexiglass da 3 mm tra due distanziali esagonali in ottone fissati alla ralla come mostrato nella foto

Fissare il trascinatore all’HUB del servomotore mediante le 4 viti senza serrarle con eccessiva forza.
Provare a far ruotare con delicatezza l’anello interno della ralla per verificare che tutto avvenga liberamente e senza impuntamenti.

recuperare il piatto superiore e 4 viti M3x8 TSEI
Fissare il piatto in plexiglass ai 4 distanziali esagonali della ralla mediante le 4 viti (non stringerle eccessivamente).
A questo punto il montaggio della base rotante in plexiglass servo può dirsi terminato

Filmato illustrativo
Azionamento del servomotore
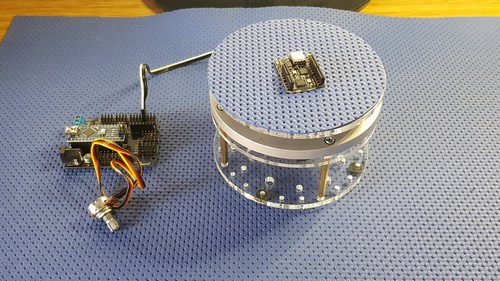
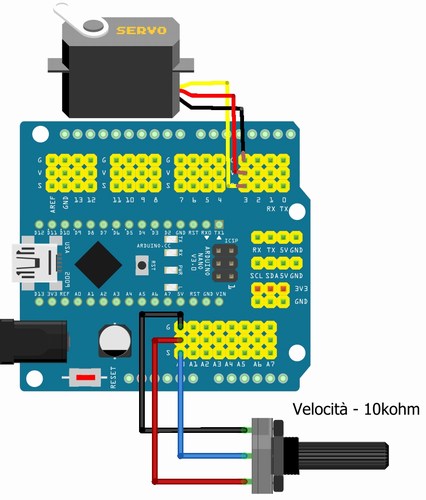
Per azionare il servo della base rotante in plexiglass si utilizzerà un semplice circuito comandato, in questo caso da un Arduino Nano. Per questo sono necessari i seguenti materiali:
Arduino Nano |
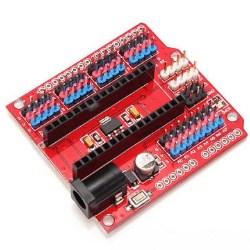
Shield Arduino NANO |

Potenziometro lineare 10 kΩ |

Cavi di collegamento |
come visibile nello schema sotto riportato, questo è molto semplice, il potenziometro, il cui pin centrale è collegato al pin A0, sarà utilizzato per regolare la velocità di rotazione della tavola.

Altrettanto semplice è lo sketch da caricare nella memoria di Arduino. La gestione del servomotore è affidata alla libreria Servo.h, Per controllare la velocità di rotazione utilizziamo il valore fornito dalla tensione variabile ricavata al potenziometro e la funzione map.
Il valore viene poi utilizzato nel comando write() che impartisce al servo l’angolo a cui posizionarsi. Sui servo a rotazione continua imposta la velocità di rotazione: 0=velocità massima in un senso, 90=fermo, 180=velocità massima nella direzione inversa.
Nel nostro caso impostiamo una solo senso di rotazione, impostando il valore di partenza a 100, valori più bassi, potrebbero non essere sufficienti a vincere eventuali attriti della tavola.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
#include <Servo.h> Servo servo; int servoPin = 3; int analogPin = 0; int val = 0; void setup() { Serial.begin(9600); servo.attach(servoPin); } void loop() { val = analogRead(analogPin); val = map(val, 0, 1023, 100, 180); Serial.println(val); servo.write(val); delay (20); } |
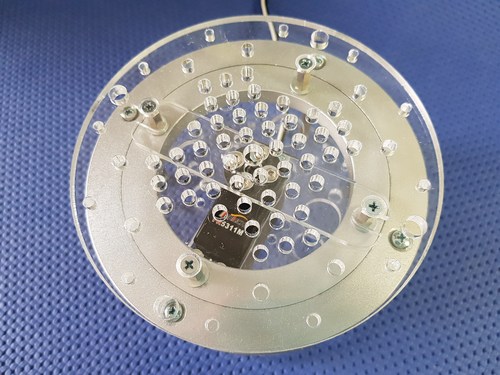
Foto della realizzazione
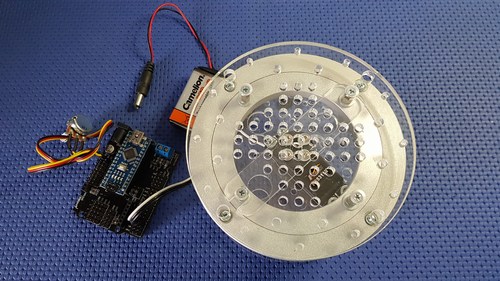
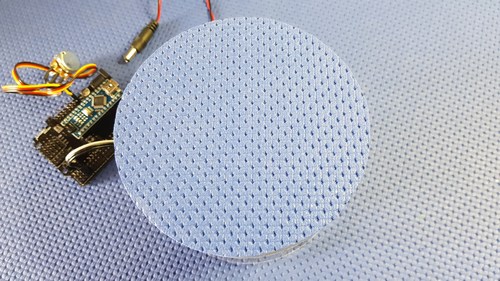
Sulla superficie del disco rotante è stato appoggiato un disco di materiale plastico per migliorare il contrasto durante le riprese.
