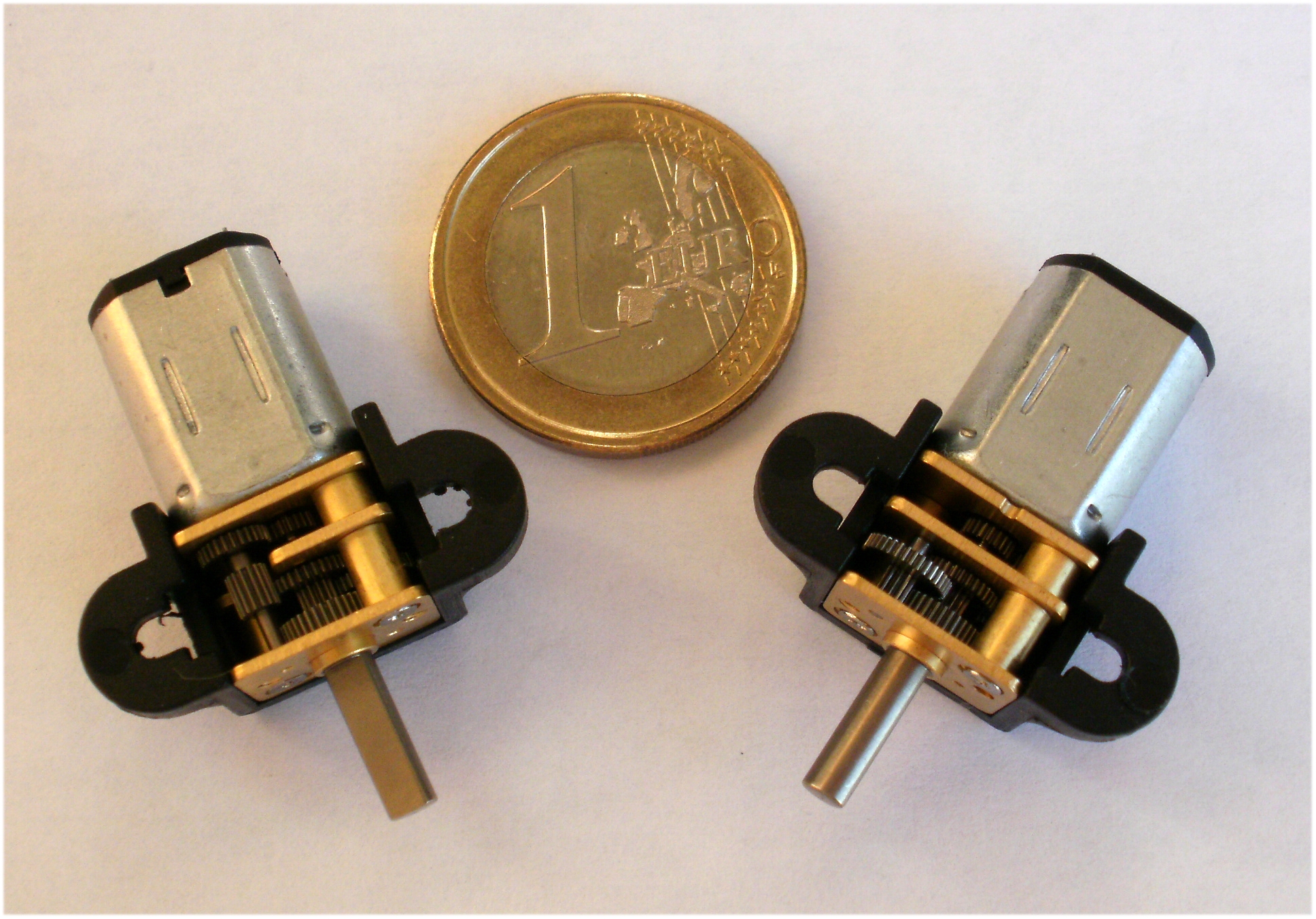
Analizziamo in questo post dei micro motoriduttori in metallo estremamente compatti. Per il loro montaggio occorre un’apposita staffa in plastica che racchiude gli ingranaggi altrimenti esposti .
Vedremo anche i gli eventuali encoder, le staffe di supporto, le ruote, i cingoli che possono essere montati su questi riduttori.
![]() Citazione del post nella sezione Robotica del Blog di Elettronica In
Citazione del post nella sezione Robotica del Blog di Elettronica In


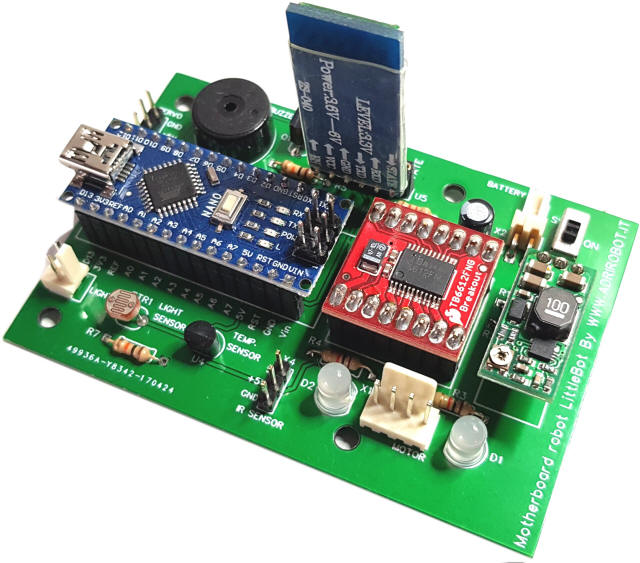
 Il PCB è stato progettato con il programma
Il PCB è stato progettato con il programma