Vi presenterò tredici progetti completi di robot autocostruiti realizzati da me. Ognuno sarà brevemente descritto nelle sue caratteristiche principali e si farà riferimento ai link che vi permetteranno di leggere gli articoli completi.
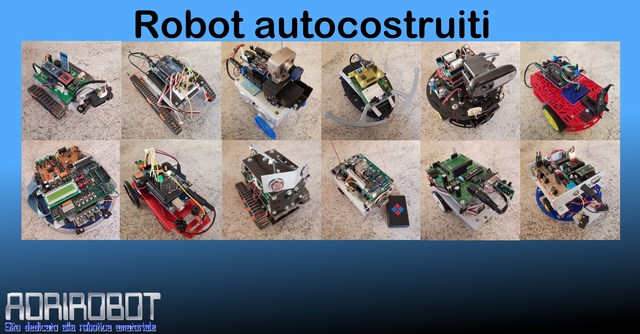
Molti degli articoli sui progetti completi di robot autocostruiti a cui faccio riferimento sono stati pubblicati dalla rivista Fare Elettronica e sul Blog Elettronica Open Source.

Indice
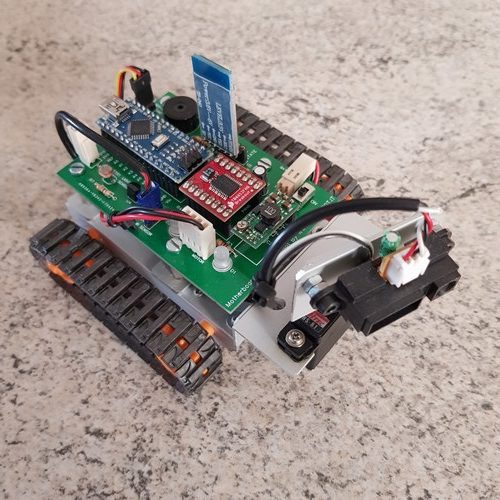
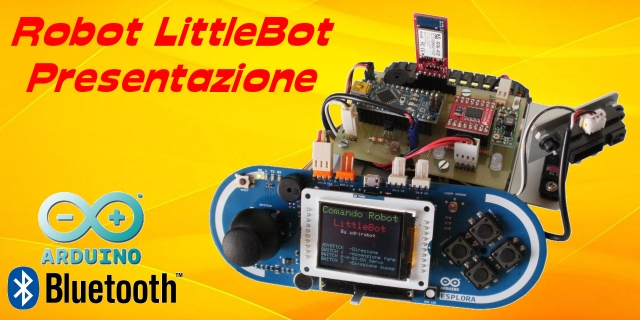
LittleBOT
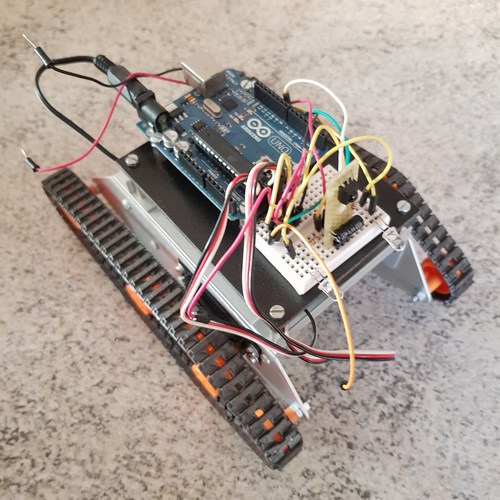
LittleBOT, si tratta di un piccolo robot dotato di una scheda di controllo su cui è installato una scheda Arduino Nano. Il telaio è in alluminio ed è mosso da due moto riduttori realizzati completamente in metallo che muovono una coppia di cingoli.
Il robot è dotato di sensori che gli permettono di rilevare alcuni parametri tra i quali la luminosità e la temperatura. Un sensore frontale, azionato da un servomotore, permette al robot di sondare lo spazio frontale e misurare la distanza da eventuali ostacoli e in questo modo di evitarli.
La presenza di un modulo Bluetooth permette di pilotare il robot in modo wireless.
La costruzione del robot è stata oggetto di una serie di articoli pubblicati tra il 2013 e il 2014 sul Blog Elettronica Open Source.




BUG
BUG così chiamato per la vaga rassomiglianza con un insetto dotato di “antenne”. Per l’assemblaggio del robot si è ricorso ai componenti derivati dalle opere a fascicoli “COSTRUISCI E PROGRAMMA IL TUO ROBOT” con cui si assemblava il robot Panettone da cui si si è ricavata la DeA Basic Stamp come scheda di controllo. Il telaio è invece stato ricavato dall’opera “Ultimate Real Robot” con cui si costruiva il robot Cybot (telaio e gruppo moto riduttori) entrambe le opere edite dalla De Agostini.
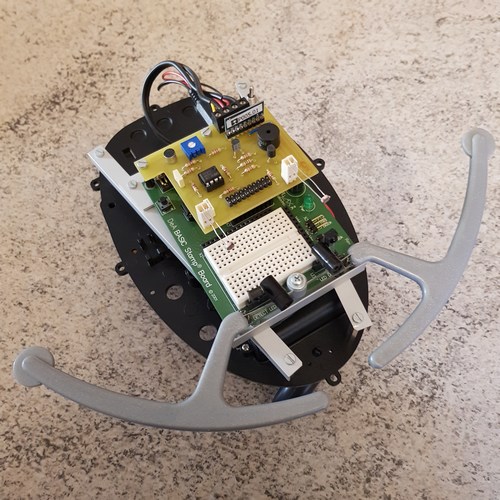
La costruzione del robot è stata oggetto di due miei articoli pubblicati dalla rivista Fare Elettronica sui numeri 263 e 265 dell’anno 2007.
 |  |

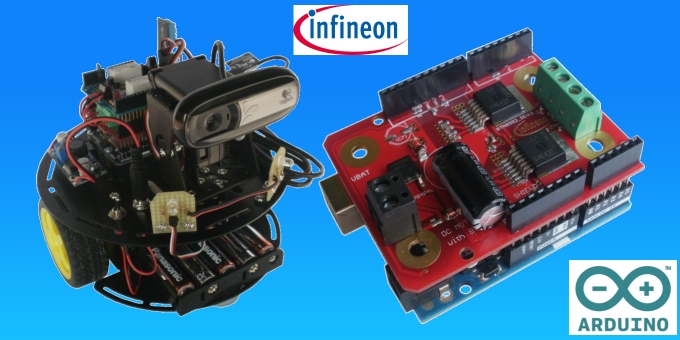
RoboYun
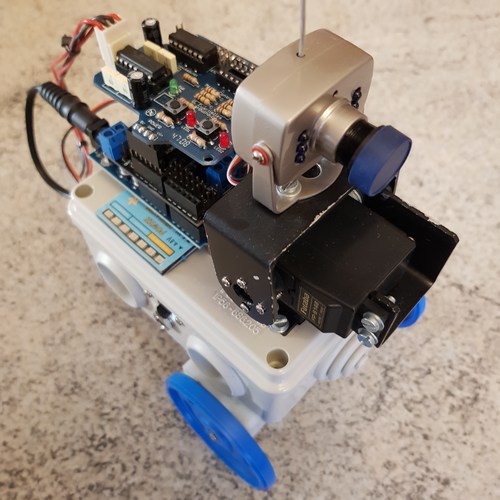
RoboYún è un robot esploratore comandato in remoto utilizzando il sistema Wi-Fi. La scheda utilizzata è il modello Arduino Yún. Sulla scheda sono presenti alcuni connettori tra i quali una porta USB Host a cui è possibile collegare una web camera, che gestita dalla sezione Linux, permette di trasmettere le immagini riprese attraverso la rete Wi-Fi. Per il funzionamento viene utilizzato uno speciale shield che permette la gestione dei motori, dei servo del dispositivo Pan & Tilt.
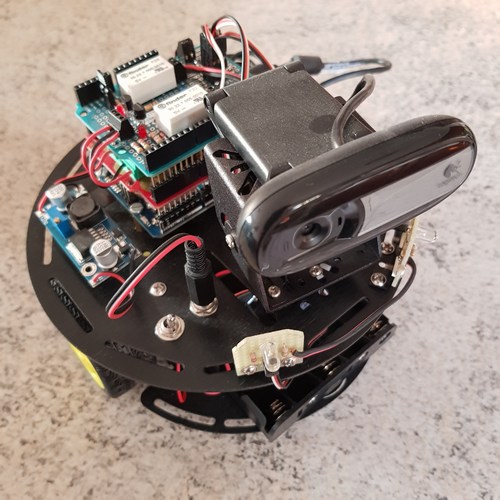
Il progetto è stato oggetto di un articolo dal titolo “RoboYun, robot esploratore con webcam e controllo Wi-Fi” pubblicato sul sito Elettronica Open Source in data 16 settembre 2015.
L’articolo faceva anche parte del contest proposto da Elettronica Open Source intitolato “20 arduino motor shield di Infineon gratis per voi” , in cui il progetto da me proposto si è classificato tra i 20 vincitori.
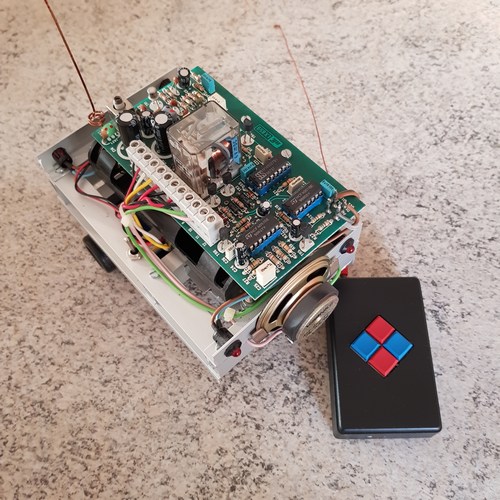
ROBOPAD
RoboPad, è basato sul kit 2WD Mini Robot Mobile Platform FT-MC-001. Il comando del robot è realizzato tramite un Gamepad Shield virtuale su Smartphone collegato tramite Bluetooth (shield 1Sheeld).
La sua costruzione è molto semplice. Si gestisce tramite un’App e il programma caricato in memoria. Oltre ai tasti direzionali, è possibile azionare un buzzer tramite la pressione del tasto rosso, o accendere un led premendo il tasto blu(presenti sull’App).
adriBOT
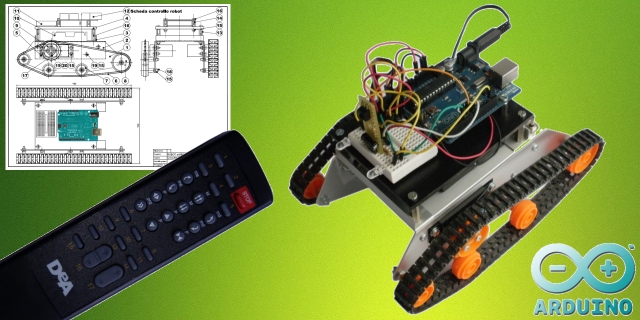
adriBOT, si basa sul Boe-Bot Tank Treads prodotto dalla Parallax, a cui sono state apportato alcune modifiche ed integrazioni. La versione originale prevede che la parte centrale del robot sia formato dal telaio del Boe-Bot e la scheda di comando sia la Boe-Bot.
In adriBOT è stato modificato parte del telaio ed è stata utilizzata una scheda Arduino UNO.
Il pilotaggio del robot è effettuato tramite un semplice telecomando ad infrarossi.
I motori sono rappresentati da servomotori a rotazione continua.
Il robot è stato oggetto di un mio articolo pubblicato in data 26 agosto 2014 sul Blog Elettronica Open Source
Magic BOT
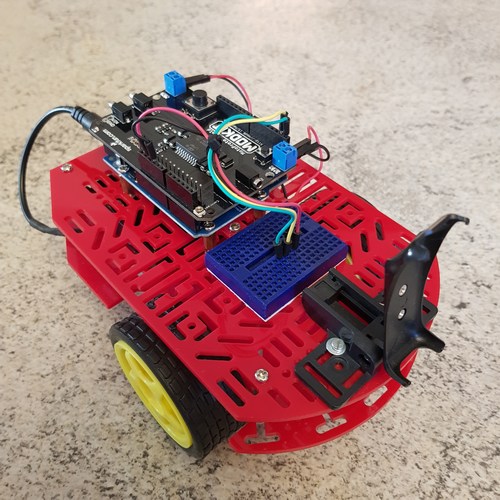
Magic BOT è basato sul telaio Magician Chassis, una piattaforma robot prodotta dalla DAGU Hi-Tech Electronic Co., LTD. Il robot è dotato di due motoriduttori con ruote da 65 mm e un ball-caster posteriore.
Le piastre del telaio sono in materiale acrilico con una vasta gamma di fori di montaggio per i sensori, controllori, alimentazione, ecc.
La scheda di comando è una Arduino UNO e si comanda tramite un modulo Bluetooth.
Il progetto di questo robot è stato pubblicato sul n°324 in edicola nel mese di Giugno 2012 della rivista Fare Elettronica, con l’articolo “Robot comandato da smartphone Android”

Opportunity
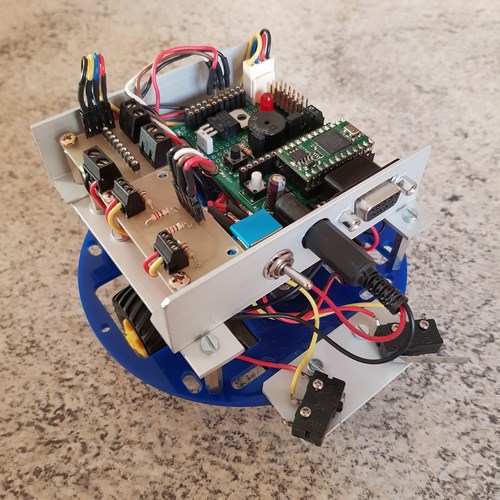
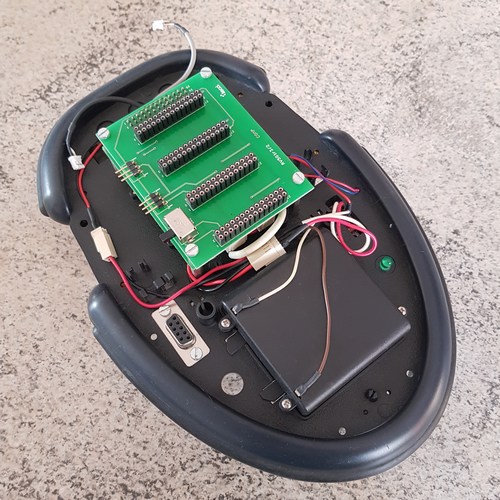
Opportunity, deve il suo nome al più famoso rover che, con il gemello Spirit, ha raggiunto Marte il 25 gennaio 2004. Il modello costruito nel 2009, ha un gruppo motore ed è formato dal doppio moto riduttore Tamiya che contiene due piccoli motori DC che trasmettono il moto a due assi esagonali separati.
Il riduttore è collegato ad una coppia di ruote di produzione Tamiya; posteriormente è presente una ball caster. Il tutto è montato su in telaio prodotto dalla Pololu.
Come scheda di controllo si è utilizzato una CB220 della CUBLOC; i motori sono comandati dal modulo motore e i sensori di contatto connessi al modulo di contatto.
La costruzione delle scheda di controllo, dei moduli e del robot sono stati oggetto di tre miei articoli pubblicati dalla rivista Fare Elettronica sui numeri 291, 292 e 293 dell’anno 2009
 |  |  |
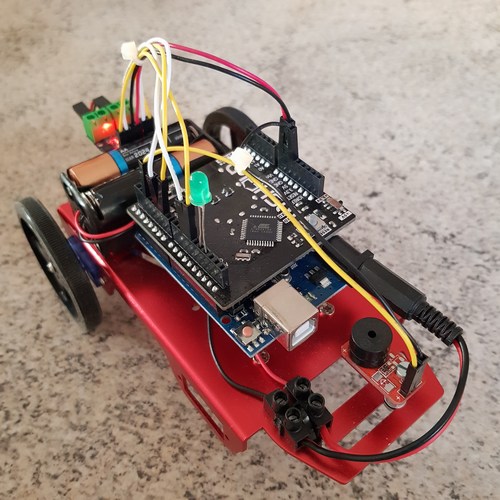
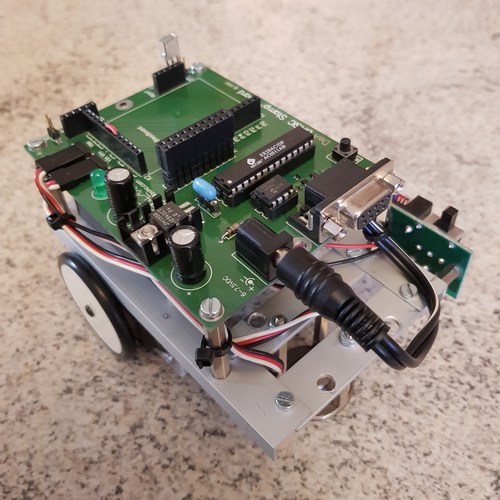
ArduinoBOT
ArduinoBot è basato sulla Scheda di controllo Arduino UNO,; per muoversi utilizza due ruote in ABS, azionate da due moto riduttori che sono comandati da una scheda motor shield.
Per il comando del robot è previsto l’utilizzo di un gamepad con 2 joystick analogici, compatibile con Playstation 2: è connesso ad una stazione di controllo formata una seconda scheda Arduino su qui è montato un Modulo XBee. Il Modulo XBee trasmittente comunica con quello ricevente installato sul robot su una DFRobot I/O Expansion Shield. Il robot dispone di una telecamera wireless alimentata tramite un convertitore DC/DC e mossa da un dispositivo Pan & Tilt.
I programmi di gestione sono due: uno installato nella stazione di controllo e uno sul robot.
Il progetto del robot ArduinoBOT è presentato anche tramite la rivista Fare elettronica.
Gli articoli che erano inerenti al progetto sono riportati nei numeri 317, 318, 319, 320
Questi sono stati pubblicati tra il novembre 2011 e il febbraio 2012
 |  |  |  |
TOBOR
Tobor è un progetto realizzato nel 2004 che si proponeva di realizzare un piccolo robot, non solo totalmente funzionante, ma con ottime implementazioni delle funzionalità presenti negli altri robot general purpose.
La base di partenza prevede l’utilizzo di alcuni componenti che erano venduti con delle pubblicazioni disponibili al momento del suo realizzo.
Le motivazioni di tale scelta sono: la buona qualità di tali componenti, il basso costo d’acquisto, l’opportunità di avere una base identica (non facilmente ottenibile diversamente) per tutti i partecipanti del team (geograficamente distribuiti nel territorio).
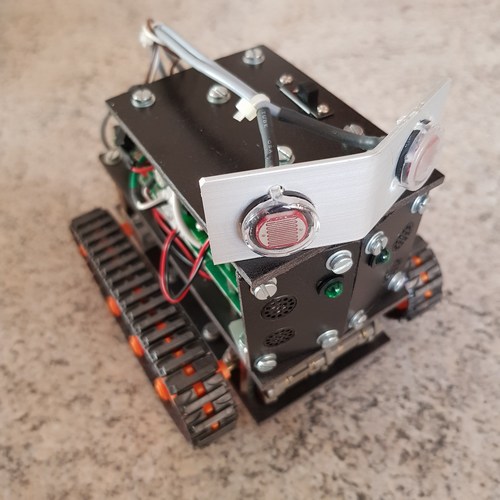
VIKING
VIKING risale al 2006/2007. Il gruppo motore è formato da un doppio motoriduttore. Il riduttore è collegato ad una coppia di cingoli. La parte elettronica deriva da quella del robot Cybot di cui avevo un doppione.
Sono presenti le seguenti schede/sensori: scheda processore UC1, scheda light in/out, scheda motore, scheda processore UC2, scheda sonar in/out, due fotocellule e sensori sonar.
GOLDRAKE
Goldrake risale al 2003 ed è un unione di pezzi comuni con alcuni robot commerciali.
Da robot “Panettone” DeAgostini: la base, i motoriduttori. Dal robot Monty fornito dalla Peruzzo: la scheda motori e i sensori. Il “cervello” è rappresentato dalla scheda Micropic Trainer con montato un PIC 16F84 ricevuto con l’abbonamento all’opera della Peruzzo.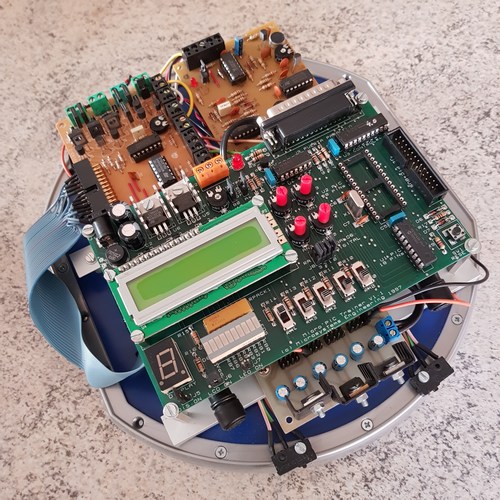
ROBBY
Robby risale al 2002 e ha comportato l’utilizzo di molti componenti derivati dal materiale fornito dalla DeAgostini per la costruzione del robot “Panettone”.
Prende il nome dal robot protagonista nel film “Il pianeta proibito” uscito nel 1956.
Il telaio è in profilato d’alluminio, mentre la scheda di controllo è la DeA Basic Stamp. I motori sono dei servomotori a rotazione continua.
GORT
Gort risale al 2002 e utilizza alcuni dei componenti derivati da materiale fornito dalla DeAgostini, per la costruzione del robot “Panettone”.
La scheda di controllo e quella del telecomando sono dei kit prodotti dalla rivista Nuova elettronica ( Scheda di controllo LX859, Trasmettitore LX858).