
In un precedente articolo è stato presentato l’Elegoo smart robot car kit. Vediamo ora le operazioni di montaggio del kit.
Per la presentazione del kit leggete l’articolo Smart Robot Car Kit V3.0 da ELEGOO

In un precedente articolo è stato presentato l’Elegoo smart robot car kit. Vediamo ora le operazioni di montaggio del kit.
Per la presentazione del kit leggete l’articolo Smart Robot Car Kit V3.0 da ELEGOO
Nei precedenti articoli abbiamo visto l’unboxing del kit e la costruzione del robot 4WD Mecanum della Keyestudio:
Analizziamo ora in dettaglio i vari componenti che lo formano:
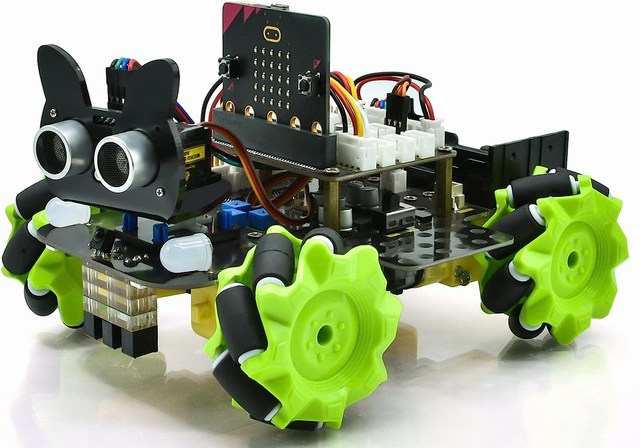
In un precedente articolo è stato presentato il robot 4WD Mecanum Robot della Keyestudio codice KS4034, vediamo ora le operazioni di montaggio.
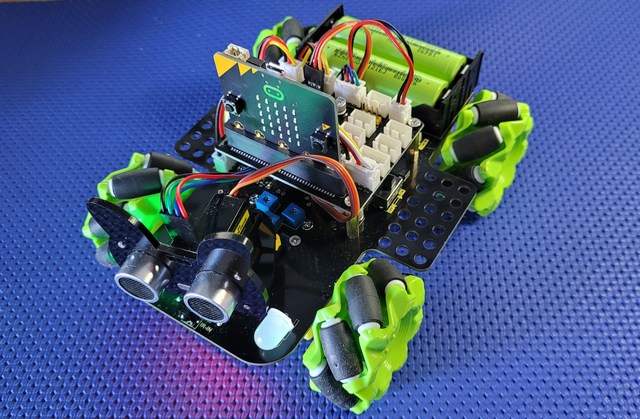
Il robot 4WD Mecanum Robot della Keyestudio codice KS4034 , si basa sulla scheda Micro:bit connessa ad una scheda di estensione e conversione di livello per le porte I/O. Sulla scheda telaio sono poi presenti: due driver per i 4 motori con relativi connettori, 4 LED WS2812B RGB, 2 ricevitori IR, 2 LED Rainbow, l’interruttore di alimentazione, il circuito per i tre sensori di tracciamento e il portabatterie. E’ poi presente un Sensore a ultrasuoni HC-SR04 azionato da un mini servomotore.
Su questo sito è già presente una scheda per controllo robot LittleBOT – Scheda controllo.
La BLE Robot board è la sua versione ridotta, di piccole dimensioni (6×6 cm), permette comunque di pilotare piccoli robot.
 Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
| Sito online per creazioni schemi e PCB | Sito produzione PCB |

All’interno del robot R2-D2 sono installate diverse schede e componenti.
Alcune schede sono utilizzate per testare le funzioni del robot stesso.
Segue la panoramica di queste schede, la serie non è al momento completa e sarà aggiornata appena saranno disponibili ulteriori informazioni.

Vediamo in questo articolo il progetto completo del robot ArduinoBOT. Il robot di tipo esploratore è basato sulla Scheda di controllo Arduino UNO, per muoversi utilizza due ruote in ABS azionate da due motoriduttori che sono comandati (nel primo prototipo) da una scheda che utilizza L293 auto costruita , mentre nella versione definitiva da una scheda motor shield.

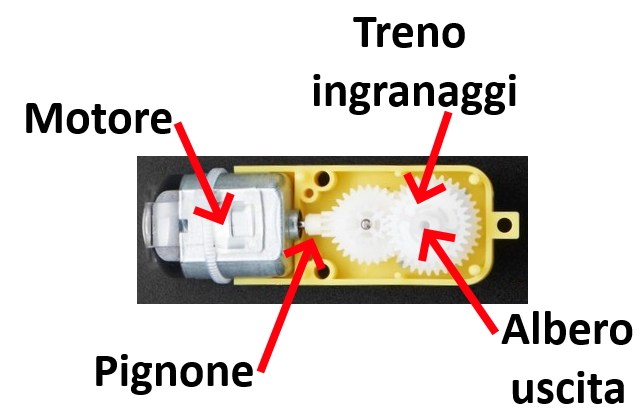
I motoriduttori consentono di adattare la coppia e la velocità dell’asse di ingresso e di uscita di un meccanismo. Questi sono formati da un motore elettrico sul cui albero d’uscita è montato un pignone.
questo trasmette il moto ad un treno di ingranaggi che ha lo scopo, di solito, di ridurre i numero di giri sull’albero di uscita. In questo articolo, vedremo come dimensionare motoriduttore robot
Kit educativo prodotto da ELEGOO denominato Smart Robot Car Kit V3.0, basato sulla scheda controller UNO R3.
Il kit è progettato per principianti e professionisti per apprendere l’elettronica, la programmazione e la robotica.
Con un tutorial facile da seguire, questo kit per per la costruzione sarà facile da costruire, vedere anche l’articolo Elegoo smart robot car kit – Montaggio

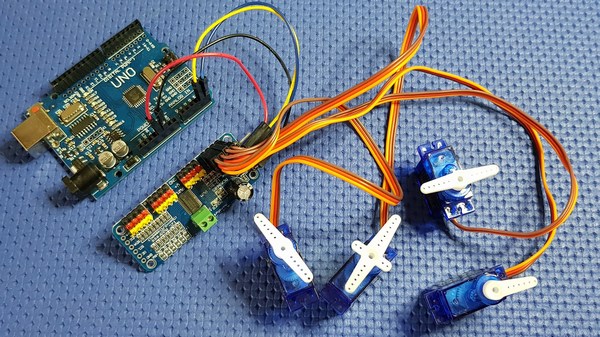
I servomotori sono molto utilizzati nel campo della robotica. Il problema è il numero di pin necessario, per esempio controllare 8 servo con Arduino significa dedicare 8 pin digitali della scheda. Questo riduce a soli 4 pin digitali utilizzabili per il vostro progetto, considerando che eliminiamo anche i pin Tx e Rx.
Per risolvere questo problema possiamo utilizzare dei particolari moduli che permettono il controllo multiplo di servomotori. Il comando del singolo servo viene fatto tramite un comando inviato tramite per esempio sulla linea seriale o I2C. Vedete anche l’articolo Realizzare un servo tester con Arduino
I link rimandano ai vari articoli in cui i moduli sono descritti con relativi progetti.
