Panoramica di alcuni moduli e shield per il controllo di motori elettrici DC, questi possono controllare un motore singolo oppure due motori. Unendo le due sezioni possono anche azionare dei motori passo-passo. Tutti sono interfacciabili con schede di controllo come Arduino o Raspberry Pi.
I link rimandano ai vari articoli in cui i sensori sono descritti con relativi progetti, schemi e sketch.

Indice
Moduli controllo motori
I moduli controllo motori permettono, di gestire uno o due motori elettrici, fornendo opportuni segnali in ingresso è possibile comandare il senso di rotazione e la velocità dell’albero motore.

Modulo IRF520 MOSFET Switch
Il modulo IRF520 MOSFET funziona come uno switch cioè interruttore.
Il modulo è progettato per commutare carichi alimentati in corrente continua. La gestione è possibile tramite un singolo pin digitale del microcontrollore. E’ in grado di pilotare un motore CC per applicazioni robotiche, o controllare altri carichi, sempre in corrente continua.


Modulo driver con MX1508
Il modulo modulo motore MX1508 è basato sul chip MX1508 di produzione cinese.
Se pilotato per esempio con una scheda Arduino UNO R3, può comandare due motori in modo indipendente in entrambe le direzioni, in configurazione H-bridge con una corrente di 800 mA , con una corrente di picco di 2,5 A, e sistema interno di controllo della temperatura.


Modulo driver per motori FT-SMC-2CH
Il modulo driver per motori FT-SMC-2CH prodotto dalla FEETECH RC Model Co.,Ltd.
Di piccole dimensioni, misurando solo 34×25 mm, permette di pilotare due motori a corrente continua, con controllo di rotazione continua bidirezionale. La corrente massima è 1,3 A per una tensione consigliata di 6V.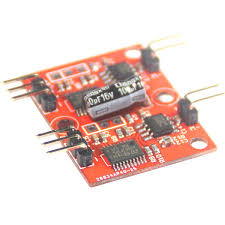
Modulo L298N Dual H-Bridge Motor Controller
Il modulo L298N Dual H-Bridge Motor Controller di piccole dimensioni ed estremamente compatta misura solo 4.3 x4.3 x 2.7 cm.
All’interno del CHIP L298N troviamo due ponti H integrati,che supportano un elevato voltaggio (teoricamente sino a 46V) ed elevate correnti (2A per ponte) 
Modulo con H-bridge tipo L9110
Questo modulo utilizza 2 chip H-bridge tipo L9110 (oppure tipo HG7881) indipendenti. Ognuno dei quali può pilotare un motore con una corrente di esercizio fino 800mA, con una corrente massima di picco di 1.5-2A
La scheda può essere pilotata con livelli logici TTL compresi tra 2,5 V e 12 V questo permette l’utilizzo con microcontrollori alimentati a 3.3V oppure 5V.
La velocità dei motori può venire controllata tramite PWM, mentre la direzione è data da un livello logico.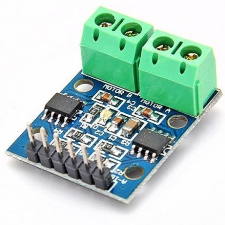
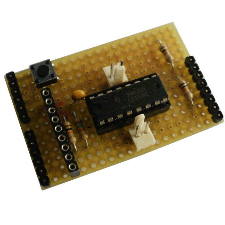
Modulo auto costruito con ULN2003A
Il modulo auto costruito basato sul driver ULN2003A in cui sono presenti 7 circuiti darlington.permette di pilotare motori passo-passo del tipo unipolare a 5 fili o 6 fili unendo i due cavi d’alimentazione. La tensione d’alimentazione del motore potrà essere compresa tra i 12 e 30 volt con una corrente massima di 500mA per fase.
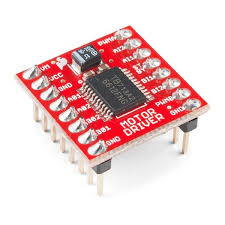
Modulo con TB6612FNG
Il modulo di controllo motore è basato sull’integrato TB6612FNG prodotto dalla Toshiba ed è in grado di pilotare due motori a corrente continua con una corrente costante di 1.2A (3.2A di picco) interfacciandosi con un microcontrollore, può anche essere utilizzato per controllare un singolo motore passo-passo bipolare. La scheda è utilizzata sul robot autocostruito LittleBOT
Modulo per stepper con ULN2003
Modulo controllo motori unipolari Stepper tipo 28-BYJ48 basato sul Driver 7 canali darlington NPN tipo ULN2003A

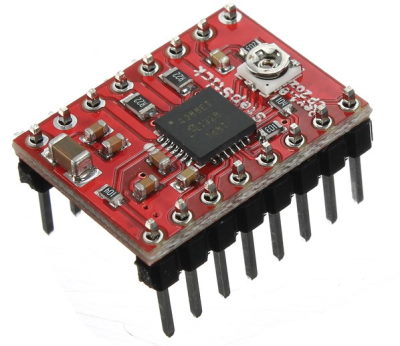
Stepper motor driver A4988
La scheda necessita di alimentazione di 5Vdc per la logica e una tensione da 8 e 35Vdc per il motore.
L’uscita può pilotare motori fino a 2A con dissipatore o ventilazione e gestisce il pilotaggio di stepper in micropasso.
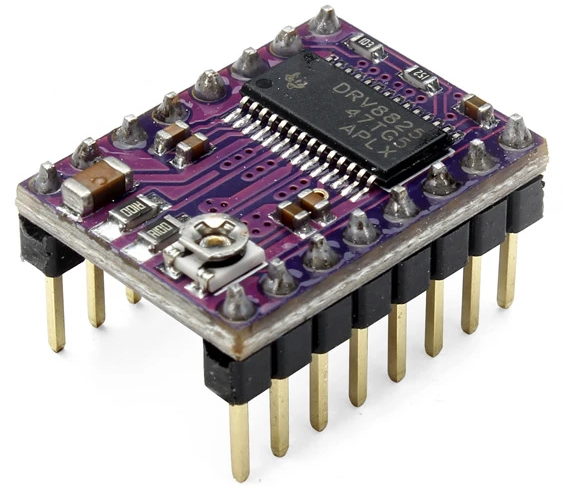
Stepper motor driver DRV8825
Si tratta di uno circuito per il controllo motori passo-passo capace di controllare appunto un motore passo-passo bipolare; può fornire fino a 1.5A per fase senza necessità di dissipatori, mentre se è dotato di dissipatore può raggiungere i 2.2A per bobina
Shield controllo motore
Gli shield controllo motori hanno le stesse caratteristiche dei moduli con la caratteristiche di essere direttamente interfacciabili con la scheda di controllo, nel nostro caso schede Arduino.
Arduino Motor Shield R3
L’ Arduino Motor Shield R3 si basa sul chip L298 della STMicroelectronics un driver dual full-bridge progettato per pilotare carichi induttivi come relè, solenoidi motori e motori passo-passo.
Utilizzando una scheda Arduino consente di pilotare due motori a corrente continua controllando la velocità e la direzione di ciascuno di essi in modo indipendente.

Motor Control Shield di Infineon
Il DC Motor Control Shield di Infineon è uno dei primi per uscita ad alta corrente ed è compatibile sia con Arduino nonché la scheda XMC1100 di Infineon. La scheda è in grado di pilotare due motori DC in modo unidirezionale (configurazione a mezzo ponte) o un motore DC bidirezionale.
La scheda è utilizzata sul robot autocostruito RoboYun

CNC Shield
Lo shield per Arduino denominato CNC SHIELD, viene utilizzata di solito per realizzare piccole macchina CNC o 3D printer. Lo Shield permette di gestire tre moduli comando motori che possono essere i driver A4988 e DRV8825.

Motor shield con driver tipo SN754410
La scheda motor shield che utilizza il driver per motore tipo SN754410 (L293D-compatible).
Può sopportare tensioni comprese tra 3.6V a 36V motori (1A), venduto in kit, doveva essere assemblato saldando i vari componenti. La scheda è utilizzata sul robot autocostruito ArduinoBOT

Shield Modkit MotoProto
Lo Shield Modkit MotoProto per Arduino rende facile il collegamento di 4 sensori, il controllo di due motori DC tramite l’integrato L298 (massima corrente 2A per motore) e un display LCD 16X2 caratteri.
Le prese accettano cavi sensore muniti di jack del tipo stereo del diametro di 2,5 mm e forniscono l’accesso a VCC, GND, e un ingresso analogico.

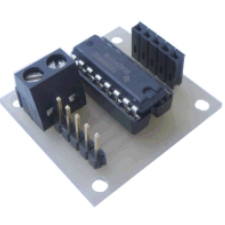
Shield autocostruito col L293D
Lo shield per Arduino contenente un L293D permette di pilotare due moto riduttori. Sulla scheda è anche presente un connettore per l’installazione di un modulo XBee montato a sua volta su una scheda XBee-Simple Board. L’integrato L293D opportunamente pilotato permette il controllo della direzione dei singoli motori e la velocità dei singoli motori ad esso collegati.