

Dal luglio 2013 collaboro con il blog online Elettronica Open Source, per cui ho scritto 20 articoli (alcuni presenti anche in 6 raccolte) che hanno come argomento la robotica o elettronica.
Tra i vari progetti realizzati e descritti negli articoli su Elettronica Open Source si trovano quelli per la costruzione di 3 robot, sul sito trovate le istruzioni per realizzarli
 adriBOT adriBOT |
 RoboYún RoboYún |



Indice
Un sito per appassionati di robotica e non solo
Articolo pubblicato il 10 luglio 2013 – Se siete appassionati di robotica nel periodo 2001-2007, avete forse costruito uno dei robot allegati ai fascicoli presenti nelle edicole.
In questo caso le pagine pubblicate sul sito www.adrirobot.it vi potranno servire per completare il progetto, magari abbandonato in un armadio.
Se invece siete appassionati di schede come Arduino cui collegare svariati tipi di sensori, nessun problema, sul sito troverete, forse, la soluzione che cercavate.
![]() PDF articolo “Un sito per appassionati di robotica e non solo“
PDF articolo “Un sito per appassionati di robotica e non solo“

Scopriamo la nuova scheda Arduino Esplora

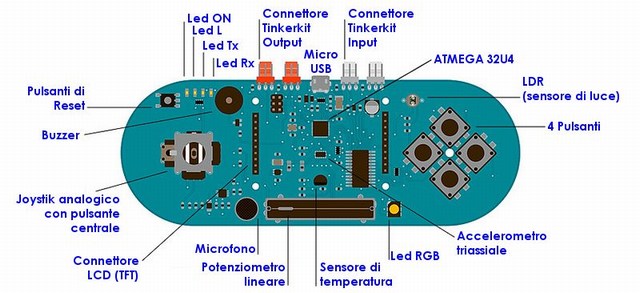
Articolo pubblicato il 29 luglio 2013 – Arduino ESPLORA: i creatori di Arduino presentano, nel dicembre 2012, questa nuova scheda. Basata sul progetto della scheda Arduino Leonardo, essa dispone già, di serie, di molti sensori, che permettono di essere subito operativi nel campo dell’elettronica.
Il design della scheda ESPLORA ricorda quello tradizionale di un gamepad con un joystick analogico sulla sinistra e quattro pulsanti a destra.
Scopriamo com’è fatta!
![]() PDF articolo “Scopriamo la nuova scheda Arduino Esplora”
PDF articolo “Scopriamo la nuova scheda Arduino Esplora”


Costruiamo un Voice Shield per far parlare Arduino
Articolo pubblicato il 7 agosto 2013 – Perché leggere un valore di tensione o una temperatura su un display quando possiamo conoscere il valore misurato grazie alla voce della nostra scheda?
Vedremo insieme, con questo articolo, come dare una voce ad Arduino.
![]() PDF articolo “Costruiamo un Voice Shield per far parlare Arduino”
PDF articolo “Costruiamo un Voice Shield per far parlare Arduino”
Programmiamo la scheda Arduino Esplora

Articolo pubblicato il 6 settembre 2013 – In un precedente articolo è stata presentata l’ultima scheda del mondo Arduino, la Esplora.
E’ stato analizzato come funziona presentandone i vari sensori presenti. In quest’articolo vediamo come installare i driver di gestione e analizziamo la libreria di comandi che ne permettono il suo utilizzo.
![]() PDF articolo “Programmiamo la scheda Arduino Esplora”
PDF articolo “Programmiamo la scheda Arduino Esplora”
Rendiamo autonoma la scheda Arduino Esplora

Articolo pubblicato il 21 ottobre 2013 – Dopo aver presentato la scheda Arduino Esplora, aver visto come istallarla e programmarla, è arrivato il momento di utilizzare la nostra scheda.
Vedremo in quest’articolo come alimentare la scheda con una batteria permettendoci di scollegarla dal PC e di renderla autonoma.
La scheda Arduino Esplora, per il suo funzionamento deve essere alimentata tramite la porta USB.
![]() PDF articolo “Rendiamo autonoma la scheda Arduino Esplora”
PDF articolo “Rendiamo autonoma la scheda Arduino Esplora”
Installiamo la camera board sulla Raspberry Pi

Articolo pubblicato il 6 novembre 2013 – Si sta sempre più diffondendo l’utilizzo della piccola scheda embedded Raspberry Pi e si moltiplicano le applicazioni che la vedono protagonista.
In questo articolo, analizzeremo la Raspberry Pi Camera che permette alla Raspberry Pi di scattare foto sino a una risoluzione di 2592 x 1944, di realizzare dei video a una risoluzione massima di 1920 x 1080 x 10bpp a 30 fps, oppure con risoluzione inferiore sino a 90 fps.
![]() PDF articolo “Installiamo la camera board sulla Raspberry Pi”
PDF articolo “Installiamo la camera board sulla Raspberry Pi”

Come saldare i componenti elettronici con una stazione di saldatura digitale

Articolo pubblicato il 27 novembre 2013 – Uno dei ferri del mestiere che non deve mancare in un laboratorio di elettronica è il saldatore, se questo è poi pilotato da una stazione di saldatura digitale, il suo utilizzo diventa ancora più semplice e affidabile.
In questo articolo vediamo le caratteristiche della stazione di saldatura ST50-D 50We come utilizzarla.
![]() PDF articolo “Come saldare i componenti elettronici con una stazione di saldatura digitale”
PDF articolo “Come saldare i componenti elettronici con una stazione di saldatura digitale”
 Stazione di saldatura digitale ST50-D 50W
Stazione di saldatura digitale ST50-D 50W
Dotiamo l’Arduino Esplora dell’interfaccia Bluetooth

Articolo pubblicato il 20 dicembre 2013 – Prosegue la nostra analisi della scheda Arduino Esplora in quest’articolo in cui vedremo come dotarla di un modulo Bluetooth, che imposteremo come Master.
Nell’esempio proposto comanderemo un secondo modulo Bluetooth, impostato come Slave, collegato a una scheda Arduino UNO.
Piloteremo un semplice led, ma l’esempio sarà utile per comandare, in futuro, dispositivi più complessi.
![]() PDF articolo “Dotiamo l’Arduino Esplora dell’interfaccia Bluetooth”
PDF articolo “Dotiamo l’Arduino Esplora dell’interfaccia Bluetooth”
Presentazione del robot LittleBot
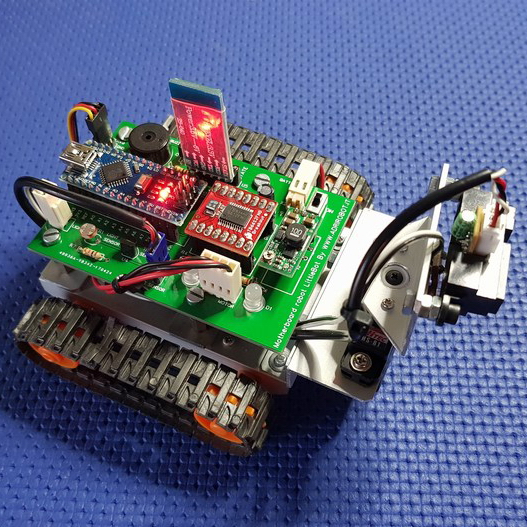
Articolo pubblicato il 25 dicembre 2013 – Oggi parliamo di robot e vi presentiamo LittleBot, un piccolo robot dotato di una scheda di controllo su cui è installato un Arduino Nano.
Il telaio è realizzato in alluminio ed e mosso da due piccoli motoriduttori realizzati completamente in metallo che muovono una coppia di cingoli.
Il robot è dotato di alcuni sensori che gli permettono di rilevare parametri quali luminosità e temperatura.
Un sensore frontale azionato da un servomotore permette al robot di scandagliare lo spazio frontale e misurare la distanza da eventuali ostacoli e in questo modo di evitarli.
La presenza di un modulo bluetooth permetterà di pilotare il robot in modo wireless tramite la scheda Arduino Esplora
![]() PDF articolo “Presentazione del robot LittleBot”
PDF articolo “Presentazione del robot LittleBot”
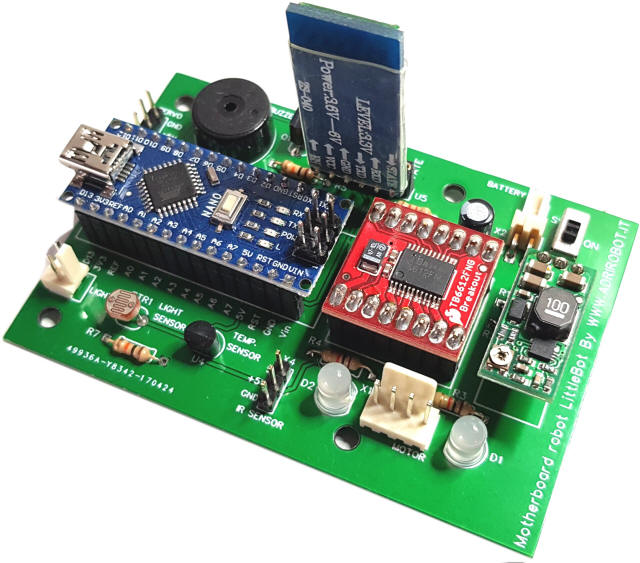
Costruzione del robot LittleBot – Scheda di controllo
Articolo pubblicato il 4 febbraio 2014 – Nell’articolo precedente è stato presentato il robot LittleBot, si tratta di un progetto open source per la costruzione di un robot di piccole dimensioni equipaggiato con una scheda di controllo basata su Arduino Nano.
Il telaio è realizzato in alluminio, il gruppo motore è realizzato con due piccoli motoriduttori che muovono una coppia di cingoli. Il robot è dotato di alcuni sensori quali luminosità e temperatura, misuratore di distanza da un oggetto.
Una volta montato il robot, potrà essere guidato tramite un collegamento wireless tipo bluetooth effettuato con una scheda Arduino Esplora.
In quest’articolo, diviso in due parti, ne tratterà il montaggio: nella prima parte si analizzerà la scheda di controllo, mentre nella seconda passeremmo all’assemblaggio vero e proprio del telaio, installazione della scheda ed eseguiremo un primo collaudo
![]() PDF articolo “Costruzione del robot LittleBot – Scheda di controllo”
PDF articolo “Costruzione del robot LittleBot – Scheda di controllo”
Costruzione del robot LittleBot – Il telaio

Articolo pubblicato il 13 marzo 2014 – Dopo aver costruito la scheda di controllo del robot LittleBot, passiamo alla costruzione del telaio: verrà realizzato con profilati in alluminio e su di esso sarà montato il gruppo motore che è formato da due piccoli motoriduttori che muovono a loro volta una coppia di cingoli.
Sul telaio trovano posto: la batteria di alimentazione, la scheda di controllo e un gruppo frontale formato da un servomotore (che aziona il sensore di distanza) e il faro già analizzato nel precedente articolo.
Una volta assemblato il tutto e collegata la scheda di controllo, potremo effettuare le prime prove di funzionamento.
In questa fase si utilizzerà una semplice applicazione per smartphone in attesa di utilizzare la scheda Arduino Esplora che analizzeremo nel prossimo articolo.
![]() PDF articolo “Costruzione del robot LittleBot – Il telaio”
PDF articolo “Costruzione del robot LittleBot – Il telaio”
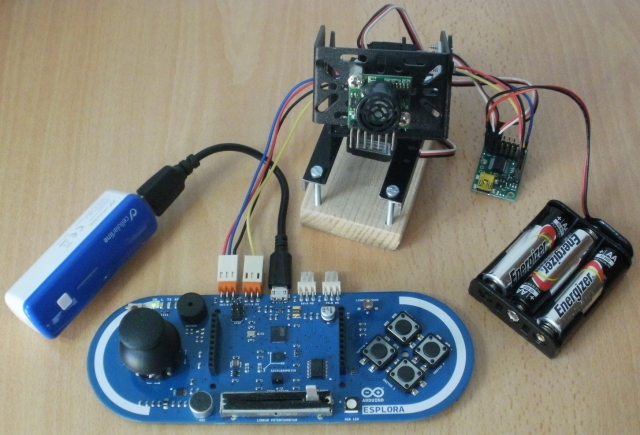
Robot LittleBot – Stazione di controllo e programmi di gestione
Articolo pubblicato il 6 maggio 2014 – Nei precedenti articoli è stata affrontata la costruzione della scheda di controllo e l’assemblaggio del telaio del robot LittleBot,, che è possibile comandare tramite l’utilizzo di uno smartphone su cui è stata caricata una speciale APP.
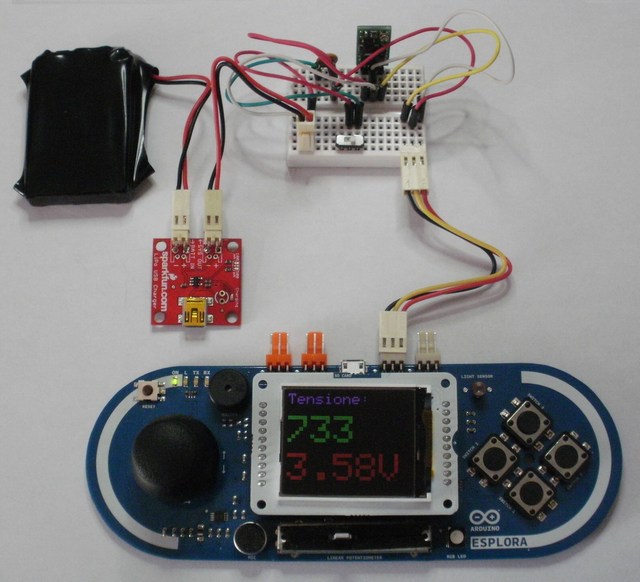
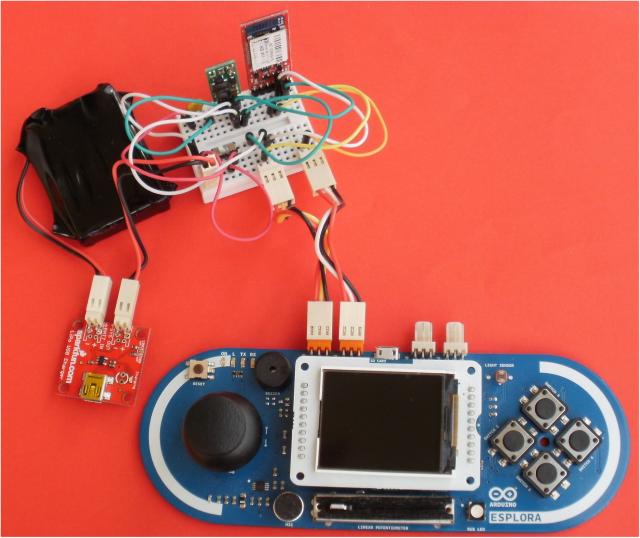
Questo articolo illustrerà come comandare il robot utilizzando la scheda Arduino Esplora equipaggiandola con un modulo Bluetooth, dotandola di una batteria che la renderà autonoma e si farà riferimento a quanto appreso in alcuni articoli già pubblicati su Elettronica Open Source.
Per migliorare l’affidabilità della stazione di controllo, rispetto a quanto in precedenza pubblicato, il modulo di alimentazione è ora rappresentato da un’unica scheda che comprende il caricabatteria, l’alimentatore e un sistema per il controllo dello stato di carica.
Per quanto riguarda il programma di controllo, sarà possibile leggere sul display della scheda Arduino Esplora lo stato dei sensori installati sul robot.
![]() PDF articolo “Robot LittleBot – Stazione di controllo e programmi di gestione”
PDF articolo “Robot LittleBot – Stazione di controllo e programmi di gestione”
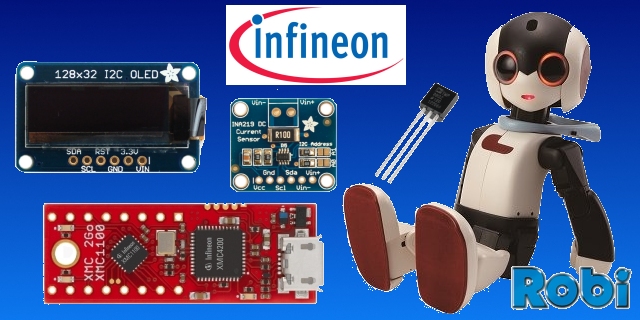
L’Evaluation Kit XMC 2GO di Infineon come scheda sensori per i robot ROBI
Articolo pubblicato il 7 maggio 2014 – Molti lettori sapranno che dal 16 gennaio 2014 è in vendita, presso le edicole, l’opera ROBI edita dalla DeAgostini, la cui vendita on-line, invece, era già iniziata l’11 novembre 2013.
 Venduta a fascicoli, permette la costruzione di un piccolo robot umanoide alto 34 cm.
Venduta a fascicoli, permette la costruzione di un piccolo robot umanoide alto 34 cm.
I movimenti del corpo sono dati da 20 servomotori digitali, mentre una scheda di riconoscimento vocale, gli permette di comprendere dei comandi e rispondere a tono in lingua italiana.
Il robot non dispone, però, di sensori quali: temperatura, luminosità, controllo del consumo della batteria, una possibilità era di realizzare un piccolo modulo da inserire all’interno del corpo del robot.
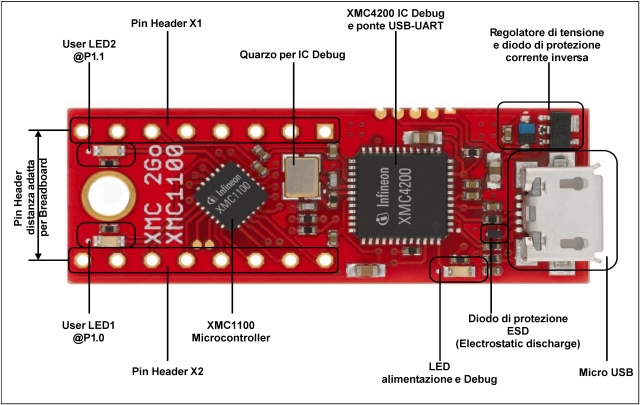
L’occasione è arrivata con il contest dal titolo “50 schede in regalo basate su ARM Cortex: Infineon premia le vostre idee” che offre l’opportunità di ricevere scheda XMC 2GO un Evaluation Kit per microcontrollore basata su un XMC1100.
Vedremo in quest’articolo quali sono i componenti scelti per la sua realizzazione, all’interno la presentazione del sensore INA219 per la misura di Tensione/corrente vedere specifico articolo Come misurare corrente/tensione con il sensore INA219
![]() PDF articolo “L’Evaluation Kit XMC 2GO di Infineon come scheda sensori per i robot ROBI”
PDF articolo “L’Evaluation Kit XMC 2GO di Infineon come scheda sensori per i robot ROBI”
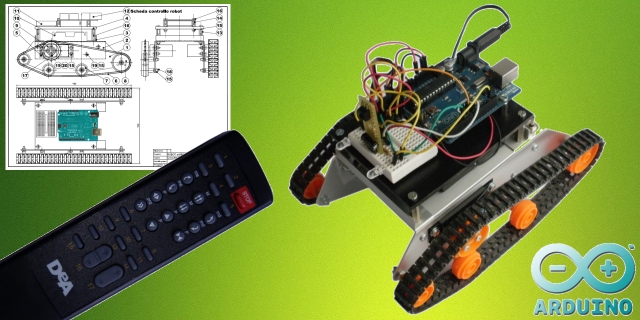
Un telecomando TV per comandare un robot cingolato
Articolo pubblicato il 26 agosto 2014 – Ormai sono molti i sistemi per controllare un dispositivo a distanza senza fili, per esempio i moderni telefoni si connettono con la rete con il sistema WI-FI oppure tramite Bluetooth.
Esiste, però, un modo ancora più economico ed è quello tramite raggi infrarossi.
Quasi tutte le apparecchiature audio e video sono controllate in questo modo, per cui i componenti necessari sono abbastanza a buon mercato, ed il sistema è ideale per l’utilizzo nel campo della robotica o dell’automazione.
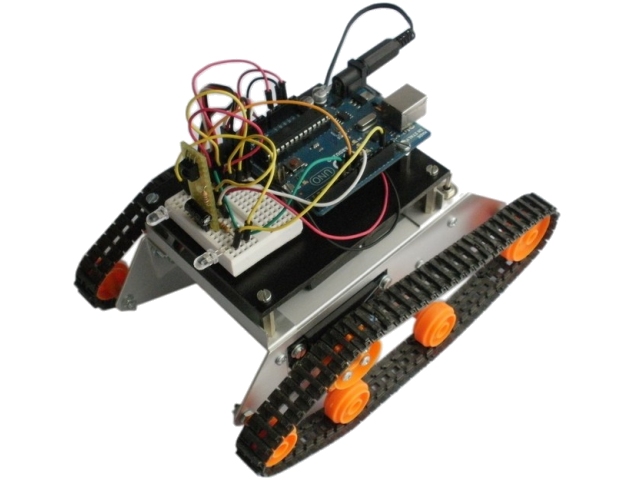
In quest’articolo analizzeremo come funziona un sistema di controllo a infrarossi, costruiremo un semplice robot cingolato e comanderemo l’azionamento dei servomotori di movimento tramite una scheda Arduino, utilizzando un sensore infrarosso e un telecomando.
![]() PDF articolo “Un telecomando TV per comandare un robot cingolato”
PDF articolo “Un telecomando TV per comandare un robot cingolato”
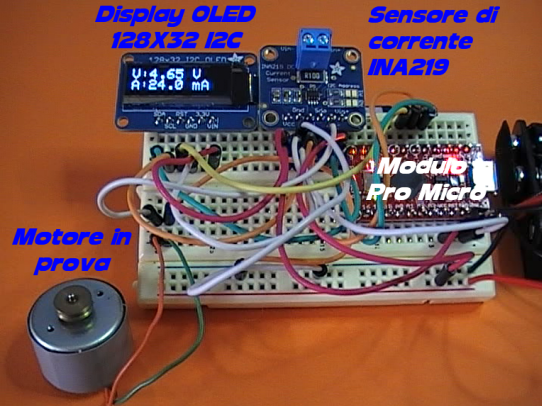
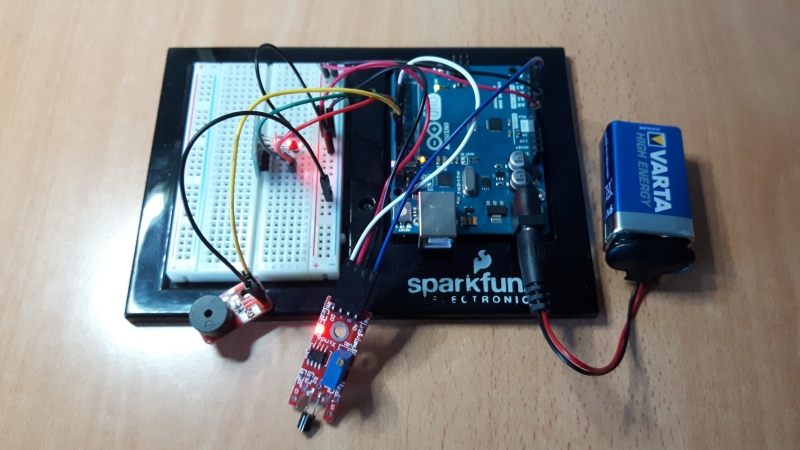
INA219: il sensore di corrente/tensione per monitorare un motore al lavoro

Articolo pubblicato il 14 ottobre 2014 – Il sensore e il display qui utilizzati erano già stati presentati nell’articolo “L’Evaluation Kit XMC 2GO di Infineon come scheda sensori per i robot ROBI”.
Il sensore tipo INA219 prodotto dalla Texas Instruments, permette di misurare la tensione e la corrente fornite da una fonte di energia, nel nostro caso una batteria, comunicando i dati mediante un’interfaccia I2C.
L’integrato controlla sia la caduta shunt sia la tensione di alimentazione, con tempi di conversione e filtraggio programmabili. I dati vengono mostrati su un piccolo display di tipo OLED, anch’esso connesso tramite l’interfaccia I2C.
In quest’articolo, ne vedremo l’utilizzo per controllare il funzionamento di un piccolo motore elettrico. Per la sua gestione, si è utilizzato un modulo Arduino, rendendo il dispositivo facile da programmare usufruendo delle librerie già disponibili.
![]() PDF articolo “INA219: il sensore di corrente/tensione per monitorare un motore al lavoro“
PDF articolo “INA219: il sensore di corrente/tensione per monitorare un motore al lavoro“
Gestione di un dispositivo Pan& Tilt con la scheda Arduino Esplora

Articolo pubblicato il 20 gennaio 2015 – Lavorare con servomotori ed una scheda Arduino UNO è una cosa piuttosto semplice, basta collegare l’alimentazione e il cavo del segnale del servo ad una delle tante porte digitali presenti.
La gestione è facilitata dall’opportuna libreria già presente tra quelle standard. Ma cosa succede se come nel caso della scheda Arduino Esplora le porte digitali disponibili sono solamente due e i servo da comandare sono molti di più?
La soluzione più semplice è quella presentata in questo articolo. Viene mostrato come utilizzare dei semplici moduli appositamente creati per comandare i servomotori: possono essere gestiti tramite una linea seriale per la ricezione dei comandi e che permettono di comandare un minimo di 6 servomotori.
![]() PDF articolo “Gestione di un dispositivo Pan & Tilt con la scheda Arduino Esplora”
PDF articolo “Gestione di un dispositivo Pan & Tilt con la scheda Arduino Esplora”
Arduino Micro e BMP180 Bosch per realizzare una Weather Station
Articolo pubblicato il 4 giugno 2015 – In un recente articolo pubblicato su Elettronica Open Source dal titolo “Quale scheda Arduino scegliere per il mio progetto?” sono stati elencati vari modelli della serie Arduino.
Analizziamo nel dettaglio uno dei modelli presentati: la scheda ARDUINO MICRO.
Questa è stata sviluppata in collaborazione con Adafruit, e utilizza come processore l’ATmega32U4. La scheda con una superficie di 9 centimetri quadrati mette a disposizione 20 pin I/O digitali, di cui 7 PWM e 12 ingressi analogici.
Il modulo include tutto ciò che serve per il supporto del microcontrollore come: interfaccia USB, due regolatori di tensione, vari led.
Possibilità di connetterlo con semplicità al computer ed essere subito operativo, per implementare i propri progetti.
Perciò, se la vostra applicazione ha bisogno di una miniaturizzazione “spinta”, sicuramente questa scheda potrà fare al caso vostro.
Nell’articolo vedremo anche un’applicazione che permette di visualizzare su display TFT i dati provenienti dal sensore BMP180 e quindi avere i valori di pressione, temperatura e altitudine sul livello del mare
![]() PDF articolo “Arduino Micro e BMP180 Bosch per realizzare una Weather Station”
PDF articolo “Arduino Micro e BMP180 Bosch per realizzare una Weather Station”

RoboYún, robot esploratore con webcam e controllo Wi-Fi
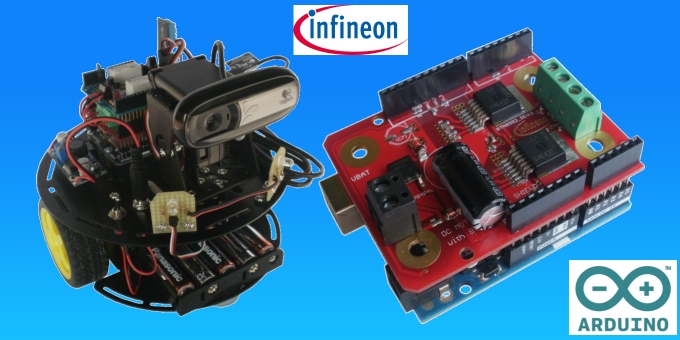
Articolo pubblicato il 16 settembre 2015 – Sul sito Elettronica Open Source, ho già presentato alcuni modelli di robot comandati in remoto.
Per esempio LittleBOT che è comandato tramite Bluetooth o adriBOT che era comandato tramite un telecomando ad infrarossi.
L’opportunità data dal contest 20 Arduino Motor Shield di Infineon gratis per voi, ha portato all’idea di realizzare un nuovo modello di rover. Questo è comandato in remoto utilizzando il sistema Wi-Fi.
Per il controllo si è utilizzata una scheda Arduino Yún che è la combinazione di un classico Arduino Leonardo con un sistema-one-chip Wi-Fi.
Su questo in cui viene eseguito Linino (un MIPS GNU / Linux basata su OpenWRT).
Altre particolarità sono date dal fatto che sulla scheda sono presenti alcuni connettori tra i quali una porta USB Host.
A questa è possibile collegare una web camera, che gestita dalla sezione Linux, permette di trasmettere in streaming le immagini riprese attraverso la rete Wi-Fi.
![]() PDF articolo “RoboYún, robot esploratore con webcam e controllo Wi-Fi”
PDF articolo “RoboYún, robot esploratore con webcam e controllo Wi-Fi”

Date voce ai vostri progetti
Articolo pubblicato il 2 marzo 2017 – Si ha l’esigenza a volte, nelle proprie applicazioni elettroniche, di avere oltre che un segnale visivo dato da un led, di un segnale sonoro, ma non il semplice suono fornito da un buzzer ma un vero e proprio messaggio.
In quest’articolo vedremo invece l’utilizzo del modulo WTV020-SD, poco costoso, che conserva le informazioni su una memoria MicroSD analoga a quelle presenti nei moderni smartphone.
Questo modulo con pochi componenti esterni, permette di riprodurre suoni (o voci) memorizzati.
![]() PDF articolo “Date voce ai vostri progetti”
PDF articolo “Date voce ai vostri progetti”

Sensori di prossimità, cosa sono e come si usano

Articolo pubblicato il 4 aprile 2019 – Oggi è diventato normale, sfiorando uno schermo con le dita, comporre un numero telefonico: questo è possibile grazie al touchscreen capacitivo.
Negli impianti industriali i PLC controllano la posizione delle parti in movimento tramite vari tipi di sensori di prossimità.
Questi sensori, emettono radiazioni elettromagnetiche, come un radar, o rilevano radiazioni magnetiche o luminose.
circuiti interni analizzano, per esempio, le onde riflesse ed emettono un segnale digitale (ON-OFF) o analogico.
In questo articolo analizzeremo le varie tecnologie utilizzate e vedremo poi come poterle integrare nelle nostre applicazioni.
Riviste di cui è possibile scaricare il file PDF

EOS Book #13 – Maggio 2014 (LittleBot – Stazione di controllo e programmi di gestione)

Costruiamo insieme un robot cingolato comandato dal telecomando TV
")
EOS Book #17 – Ottobre 2014 (INA219: Il sensore di corrente per monitorare un motore al lavoro)
