Kit di montaggio per la costruzione di un mini pinza robotica tipo SNM2700, il suo peso è di soli 17 g, realizzata in materiale plastico tramite stampante 3D è azionata da un servo tipo SG90.

Indice
Descrizione
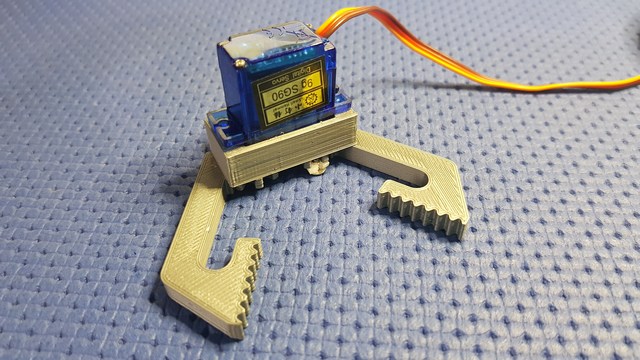
Il modello di mini pinza robotica SNM2700 illustrato in questo articolo è realizzato la plastica grigia.
Come visibile dai particolari è come indicato è realizzato tramite una stampante 3D, per questo motivo la sua finitura superficiale riporta alcuni difetti.

Specifiche
- Modello: SNM2700
- Peso: 17 g
- Dimensioni: 6 cm x 3,2 cm x 3,5 cm (lunghezza, larghezza e altezza)
- Tensione: 3.5V-6V
- Modalità di controllo: servo SG90

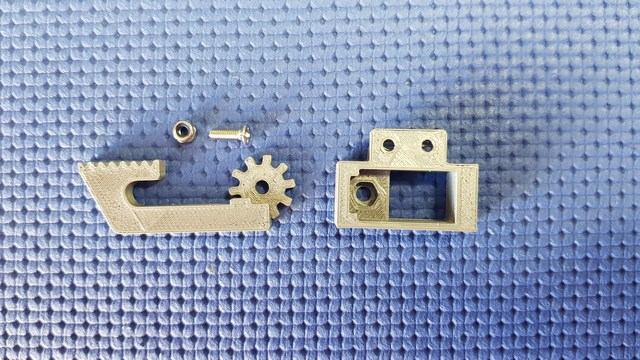
Contenuto del kit
Il kit per il montaggio della mini pinza robotica SNM2700 è contenuto all’interno di un sacchetto in materiale plastico, sono presenti:
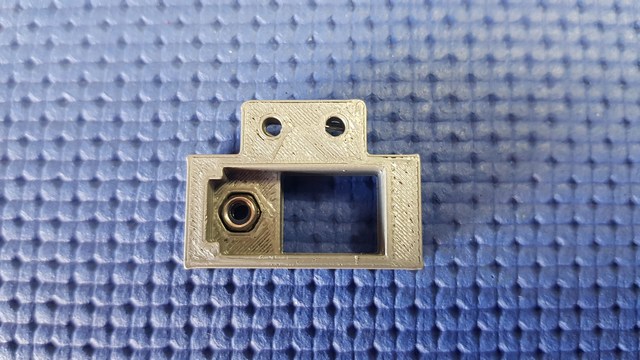
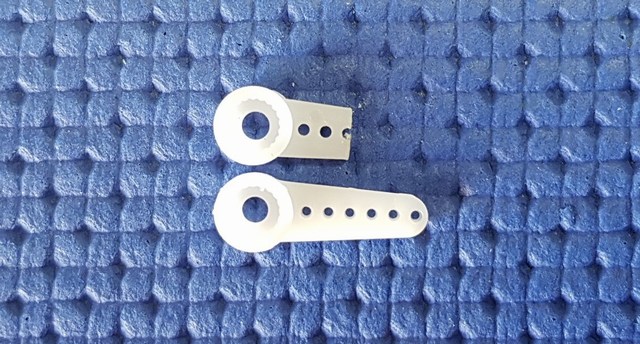
- Supporto pinza
- Pinza DX
- Pinza DX
- Servo SG90 completo della sua minuteria
- N° una vie M3 x10 e n° 2 dadi M3
- Un piccolo cacciavite a croce


Dove trovare la pinza
Il kit della pinza può essere trovato presso il sito Banggood, il codice ID è 1670172, il costo al momento della scrittura dell’artico è di circa 9 €.
Caratteristiche del servo SG90
Il sevo utilizzato nella pinza è il modello SG90, di piccole e dimensioni e del peso di soli 9g.
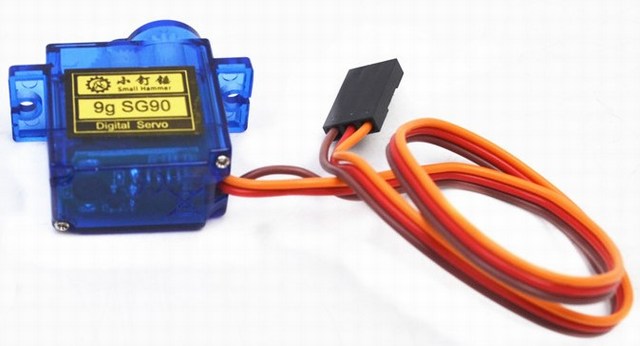
Sotto la tabella con le sue caratteristiche
| Ingranaggi | In plastica |
| Tensione di esercizio | 4.8 v |
| Intervallo di temperatura: | 0 ℃ _ 55 ℃ |
| Larghezza banda morta: | 1us |
| Lunghezza cavo | 25 cm |
| Peso(g) | 9 |
| Connettore | JR |
| Coppia(kg/cm)(4.8v) | 1.8 |
| Velocità(sec/60deg) | 0.1 |
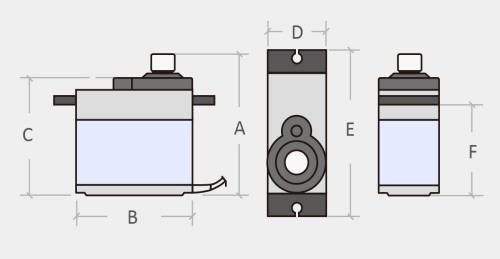
| A(mm) | 34.5 |
| B(mm) | 22.8 |
| C(mm) | 26.7 |
| D(mm) | 12.6 |
| E(mm) | 32.5 |
| F(mm) | 16 |

nella confezione sono forniti anche le viti di fissaggio e varie ancore

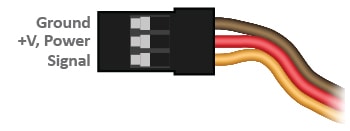
Sotto è visibile la conformazione del connettore del servo
Montaggio della pinza
Seguono le immagino che illustrano le varie operazioni di montaggio, vedere anche la specifica pagina del sito del costruttore Small Hammer



La foto mostra come deve essere tagliata l’ancora da fisare poi all’albero del servo
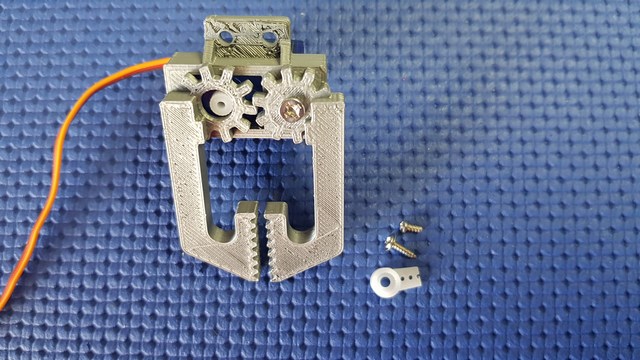
La vite utilizzata per la movimentazione della pinza dovrà essere tagliata come nella foto

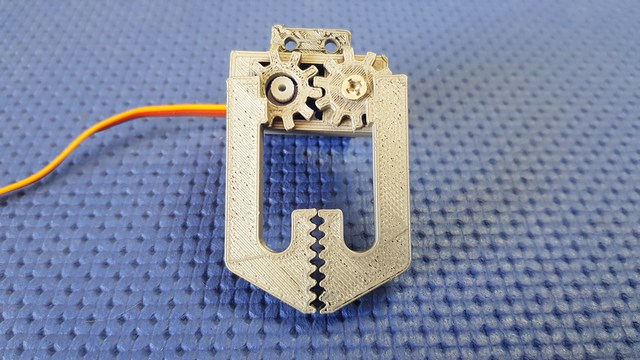
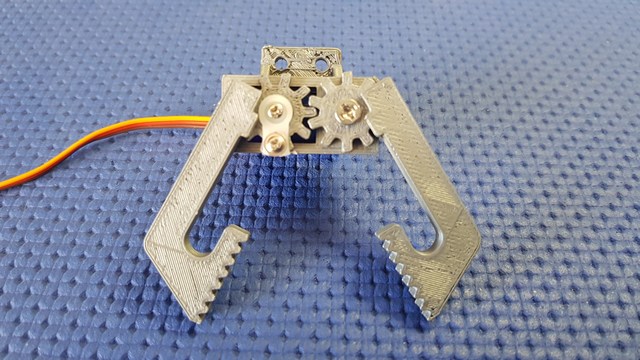
Ecco la pinza a montaggio terminato
Test della pinza
Per il test della pinza si potrà utilizzare lo schema sotto riportato, sono necessari
- Scheda di controllo Arduino UNO o Arduino Nano
- Un potenziometro dal valore di 10 KΩ
- Cavetti di collegamento
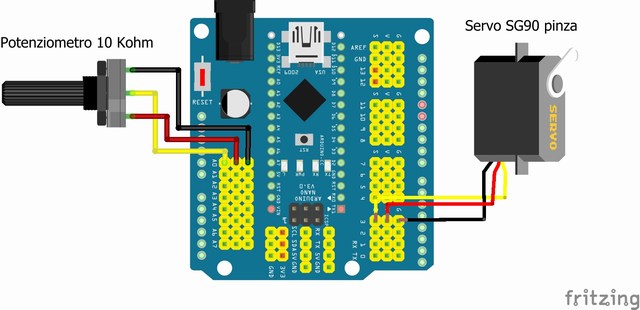

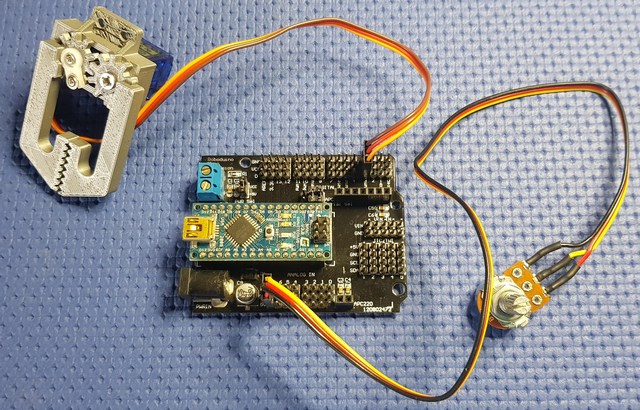
per il test si utilizzerà il codice riportato sotto, questo permetterà di aprire e chiudere la pinza utilizzando la rotazione del perno del potenziometro. Nello sketch è utilizzata la funzione map () che permette di trasformare il valore digitale del potenziometro nel valore di rotazione da fornire al servo.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
#include <Servo.h> // libreria di gestione servo // creiamo la variabile myservo per controllare il servo-motore Servo myservo; // pin analogico per leggere il potenziometro int potpin = A0; // pin digitael a cui è collegato il servo int pinza = 3; // variabile dei valori del potenziometro int val; //valore rotazione int rot; void setup() { Serial.begin(9600); myservo.attach(pinza); //chiudiamo la pinza myservo.write(90); delay (500); } void loop() { val = analogRead(potpin); // leggiamo il valore analogico // convertito in digitale da 0 a 1024 Serial.println(val); rot = map(val, 0, 1024, 0, 180); // mappiamo il valori,in un range da 0 a 180 Serial.println(rot); //trasferiamo il valore di rotazione al servo myservo.write(rot); delay (50); } |
Filmato illustrativo
Altri progetti relative a pinze per robot
Realizzata in alluminio, con un’apertura massima della pinza di circa 2″ (50mm), le due braccia che la formano si muovono parallelamente l’uno all’altro, ottenendo una buona presa. La pinza possiede anche una piastra di montaggio sul fondo. Il prodotto era venduto dalla SparkFun codice ROB-10332 (ora ritirata).