

Tra i sensori presenti sulla Smart Robot Car Kit V3.0 da ELEGOO troviamo Il modulo Line tracking sensor che utilizza tre sensori tipo TCRT 5000 con output digitale, analizziamo il circuito e vediamo come utilizzarlo.
![]()

Indice
Smart Robot Car Kit V3.0 da ELEGOO
Il sensore trattato in questo articolo è montato sul Kit educativo prodotto da ELEGOO denominato Smart Robot Car Kit V3.0, basato sulla scheda controller UNO R3.
Il kit è progettato per principianti e professionisti per apprendere l’elettronica, la programmazione e la robotica. Con un tutorial facile da seguire, questo kit per la costruzione di auto robot, è molto semplice e intuitivo.

Nota: attualmente la Smart card è venduta nella versioni:
- ELEGOO UNO R3 Project Smart Robot Car Kit V 3.0 Plus
- ELEGOO UNO R3 Project Smart Robot Car Kit V 4.0 (With Camera)

Circuito elettrico
Il circuito è formato da tre sensori tipo TCRT 5000 (datasheet) con output digitale al cui interno sono presenti un foto transistor accoppiato con un LED sensibile ai raggi infrarossi.
 L’uscita del diodo termina all’ingresso di un comparatore LM339D (datasheet) insieme al segnale fornito dal trimmer che regola la sensibilità.
L’uscita del diodo termina all’ingresso di un comparatore LM339D (datasheet) insieme al segnale fornito dal trimmer che regola la sensibilità.

![]() L’uscita di ogni comparatore, monitorata da un led, termina al connettore di uscita.
L’uscita di ogni comparatore, monitorata da un led, termina al connettore di uscita.
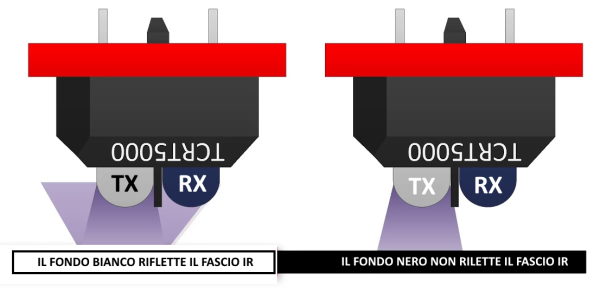
Il principio di funzionamento si basa sul fatto che la luce infrarossa emessa dal LED rimbalzando sulla superficie va a colpire il foto transistor permettendo il passaggio di corrente.
La quantità di luce riflessa dalla superficie dipende dal tipo di materiale e dal suo colore, che per il bianco è di circa 90% – 100%, mentre per il nero è 0% – 10%.
Per cui questo particolare sensore, non riesce a “vedere il colore nero”, per questo motivo il sensore viene utilizzato nei robot per seguire le linee nere disegnate per terra e, da ciò, questo modulo prende il nome di Line Tracking Sensor.
Questo sensore è molto efficace ma non è possibile ottenere una distanza di lettura superiore a 1,5 cm.

Posizione di montaggio del modulo sensore
Nella foto sottostante è visibile la posizione d’installazione del sensore
![]()
Il principio di funzionamento
Come abbiamo visto i sensori di tracciamento della linea TCRT5000 sono rappresentati dai gruppi RX-TX situati sulla scheda e posizionati verso il basso.
Il primo è un LED che trasmettere il raggio infrarosso, mentre il secondo è un foto transistor sensibile a queste lunghezze d’onda. La riflessione della luce per la superficie nera è diversa da quella per la superficie bianca.
Facendo riferimento alla riga nera sono possibili tre situazioni:
- L’auto si muove lungo la linea nera. I sensori presenti sul lato destro e sinistro non rilevano la linea nera.
- L’auto si muove verso destra. Il sensore del modulo sul lato sinistro è in grado di rilevare la linea nera, quindi invierà un segnale alla scheda controller e l’auto girerà a sinistra.
- L’auto si muove verso sinistra. Il sensore del modulo sul lato destro è in grado di rilevare la linea nera, quindi invierà un segnale alla scheda controller e l’auto girerà a destra.

Quello riportato nella figura sottostante è un semplice diagramma di algoritmo del programma di tracciamento della linea di auto. Esistono comunque molti altri algoritmi più complessi come il PID (Proporzionale Integrale Derivativo)
Potremo avere tre casi: dall’alto, possiamo vedere il principio del tracciamento della macchina. Dopo l’avviamento della vettura, il modulo di tracciamento della linea deve solo rilevare la linea nera sulla superficie stradale, ed effettuare l’azione corrispondente in base al programma.
![]()
Alcuni consigli:
- La parte della curva della linea dovrebbe essere il più dolce possibile. Se il raggio della curva è troppo piccolo, è molto probabile che l’auto si sposti oltre la pista.
- Per il tracciamento della linea può essere realizzata con il nastro bianco e nero o con la carta di qualsiasi colore che si distingue dal percorso.
- Oltre al tracciamento della linea, possiamo estendere l’immaginazione per sviluppare altri programmi basati sui principi di tracciamento della linea, come quelli che limitano l’auto all’interno di una regione indipendentemente dal suo movimento.
Sketch del programma
Dopo aver creato la pista occorrerà caricare il programma nella scheda di controllo.
Dopo aver scollegato l’auto dal computer, è possibile accendere l’interruttore di alimentazione e mettere l’auto sulla pista. Quindi l’auto seguirà le linee.
Se notate che l’auto non segue la linea come previsto, regolate il trimmer presente sul modulo sino a quando seguirà con precisone la linea
![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 |
//www.elegoo.com //Line Tracking IO define #define LT_R !digitalRead(10) #define LT_M !digitalRead(4) #define LT_L !digitalRead(2) #define ENA 5 #define ENB 6 #define IN1 7 #define IN2 8 #define IN3 9 #define IN4 11 #define carSpeed 250 void forward(){ analogWrite(ENA, carSpeed); analogWrite(ENB, carSpeed); digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); Serial.println("go forward!"); } void back(){ analogWrite(ENA, carSpeed); analogWrite(ENB, carSpeed); digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); Serial.println("go back!"); } void left(){ analogWrite(ENA, carSpeed); analogWrite(ENB, carSpeed); digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); Serial.println("go left!"); } void right(){ analogWrite(ENA, carSpeed); analogWrite(ENB, carSpeed); digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); Serial.println("go right!"); } void stop(){ digitalWrite(ENA, LOW); digitalWrite(ENB, LOW); Serial.println("Stop!"); } void setup(){ Serial.begin(9600); pinMode(10,INPUT); pinMode(4,INPUT); pinMode(2,INPUT); } void loop() { if(LT_M){ forward(); } else if(LT_R) { right(); while(LT_R); } else if(LT_L) { left(); while(LT_L); } } |

