

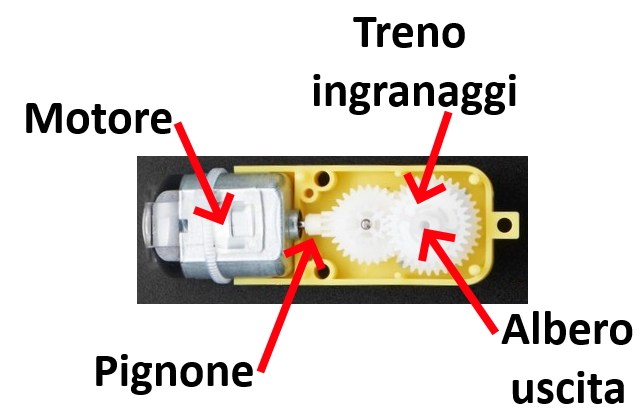
I motoriduttori consentono di adattare la coppia e la velocità dell’asse di ingresso e di uscita di un meccanismo. Questi sono formati da un motore elettrico sul cui albero d’uscita è montato un pignone.
questo trasmette il moto ad un treno di ingranaggi che ha lo scopo, di solito, di ridurre i numero di giri sull’albero di uscita. In questo articolo, vedremo come dimensionare motoriduttore robot

Indice
Cosa sono i motoriduttori ?
La nascita del motoriduttore si deve all’imprenditore tedesco Albert Obermoser che unisce un motore elettrico e un riduttore, depositando poi il brevetto nel 1928 del suo Vorlegemotor.
Ora la ditta da lui fondata è la multinazionale SEW Eurodrive.
Il riduttore di velocità è formato da un gearbox: un contenitore in cui sono alloggiati una serie di ingranaggi che permettono la riduzione della velocità di rotazione dell’albero di ingresso (albero di trasmissione). Questo sistema meccanico provvede alla trasmissione della potenza all’albero di uscita, modulandola secondo necessità.
I motoriduttori si sono poi evoluti nel tempo e ora sono presenti in qualsiasi campo che prevede l’utilizzo di macchine, sia con funzionamento meccanico sia idraulico essendo estremamente semplici da progettare e facilmente adattabili.
Ormai troviamo motoriduttori in un qualsiasi apparecchiatura da quelle di piccole dimensioni come una lavatrice, un trapano, sino a impianti di grande dimensione e potenza come gru o ascensori.

Alcuni esempi di motoriduttori




Cosa serve per dimensionare un motoriduttore?
Come abbiamo visto, i motoriduttori consentono di adattare la coppia e la velocità dell’asse di ingresso e di uscita di un meccanismo.
Di conseguenza, per scegliere il riduttore che più fa al caso vostro, sarà necessario che conosciate alcuni valori. Per prima cosa, è opportuno focalizzarsi sulla coppia.
I riduttori consentono di aumentare la coppia del motore e, quindi, di modificare la velocità di rotazione dell’ingranaggio condotto. Questo dato è di solito riportato nei datasheet del motoriduttore.
Un’altra funzione di questi dispositivi è quella di ridurre la velocità di un motore. Questo dato figura tra le specifiche tecniche fornite dai fabbricanti ed è espresso in rotazioni al minuto (rpm).
Per finire, dovrete prendere in considerazione il tipo di montaggio del riduttore.
Gli alberi di ingresso e di uscita del vostro riduttore, infatti, possono essere coassiali, paralleli o ortogonali. La scelta, in termini di disposizione degli assi, dipenderà dall’applicazione a cui il riduttore è destinato.
Esempio di calcolo
Vediamo adesso come effettuare una verifica delle caratteristiche del motoriduttore in base alla nostre esigenze.
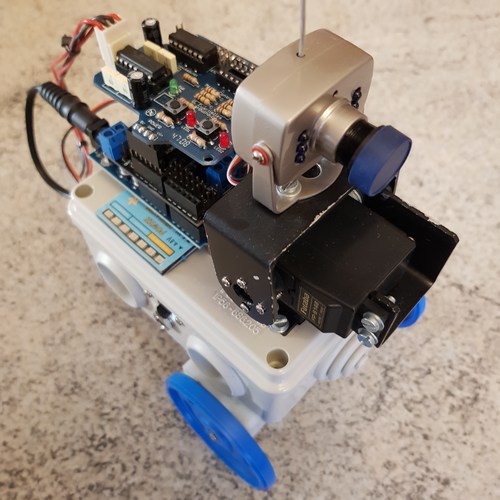
Prendiamo ad esempio il robot ArduinoBOT che è mosso da due motoriduttori tipo GM 2 – 224:1 Offset Shaft, hanno un rapporto di riduzione pari a 224:1.

Dal datasheet del motoriduttore possiamo ricavare i dati caratteristici del motoriduttori che sono riportati nella Tabella 1
Tabella 1 – Caratteristiche
(con tensione di alimentazione di 6V)
| Descrizione | Valore |
|---|---|
| Rapporto di riduzione: | 224:1 |
| Numero di giri a vuoto | 46 |
| Corrente assorbita a vuoto | 50 mA |
| Corrente di stallo | 710 mA |
| Coppia di stallo | 4.1 kg*cm |
| Lunghezza(mm): | 55 mm |
| Larghezza (mm): | 48 mm |
| Altezza (mm): | 23 mm |
| Peso: | 40 g |

Il più importante è il valore della coppia che è, nella rotazione, l’equivalente della forza nello spostamento lineare. Per spingere un contenitore, più forza metto e più accelerazione avrà il contenitore.
Lo stesso vale per una ruota, più coppia metto e più la ruota avrà un’accelerazione maggiore. Nella tabella è riportata la coppia di stallo (Stall Torque in inglese), che è la coppia massima che può fornire il motore, in questo caso però il motore è fermo, e vale per il nostro motore 4.1 kg*cm. Il dato che sarebbe necessario è la coppia nominale (Rated torque) cioè la massima coppia che assicura un funzionamento continuo del motore, senza problemi, ma in questo caso non è riportato.
Possiamo considerare la formula approssimativa che indica il valore di coppia nominale la metà della coppia di stallo.
Coppia nominale = Coppia di stallo / 2
Che per il nostro riduttore è uguale a 2 kg*cm
Vediamo gli altri dati per la verifica riportati nella tabella 2
Tabella 2 – Dati di calcolo
| Descrizione | Valore |
|---|---|
| Massa del robot | 0,75 Kg |
| Raggio delle ruote | 3,25 cm (Ø65 mm) |
| Accelerazione | 0,5 m/s2 |
| Coppia nominale | 2 kg*cm |
| Coefficiente d'attrito | 0.75 |
La spinta disponibile sulla ruota fornita da ogni riduttore sarà pari a :
F=Coppia / raggio = 2/3,25*2=1,23 kg
Dobbiamo però considerare la presa delle gomme che su un fondo solido permette al massimo una spinta pari al peso del robot moltiplicato per il coefficiente d’attrito che puoi considerare mediamente come un 0.75.
Considerando il peso del nostro robot pari a 0,75 Kg, la spinta massima sarà pari a
0,75*0,75=0,56 kg,
da cui si deduce che la potenza fornita dai riduttori è più che sufficiente.
Per quanto riguarda la velocità del robot, occorre calcolare la velocità periferica, che è quella di un punto che si trova sulla circonferenza di raggio più grande. Per definizione la velocità è il rapporto fra lo spazio S percorso e il tempo t impiegato a percorrerlo. Un punto che percorre un’intera circonferenza copre uno spazio 2 π r; se percorre n circonferenze lo spazio è 2 π r n; se il tempo impiegato è 60 secondi la velocità sarà dato dalla formula
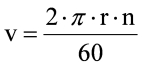
Che nel nostro caso vale 14,4 cm/s pari a 0,5 km/h.
Altro dato che possiamo ricavare è la distanza percorsa dalla ruota ad ogni rotazione
distanza=2*π *r
dato che il raggio della ruota è di 3,25 cm la distanza sarà pari a
6.28 * 3,25 = 26.4 cm.
