

Vediamo in questo articolo il progetto completo del robot ArduinoBOT. Il robot di tipo esploratore è basato sulla Scheda di controllo Arduino UNO, per muoversi utilizza due ruote in ABS azionate da due motoriduttori che sono comandati (nel primo prototipo) da una scheda che utilizza L293 auto costruita , mentre nella versione definitiva da una scheda motor shield.

Per il comando del robot è previsto l’utilizzo di un gamepad con 2 joystick analogici, compatibile con Playstation 2, questo è connesso ad una stazione di controllo formata una seconda scheda Arduino su qui è montato un Modulo XBee.
Il Modulo XBee trasmittente comunica con quello ricevente installato sul robot su una DFRobot I/O Expansion Shield. Il robot dispone poi di una telecamera wireless alimentata tramite un convertitore DC/DC e mossa da un dispositivo pan & tilt.
I programmi di gestione sono due uno da installarsi nella stazione di controllo e uno sul robot.

Indice
ArduinoBOT Progetto completo del robot
Sotto è riportato il disegno del rotot dove sono indicati i principali componenti
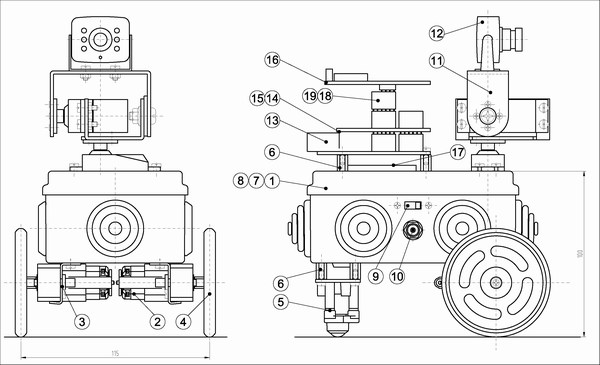
| Numero | Quantità | Descrizione |
|---|---|---|
| 1 | 1 | Telaio base – SCAME N°685.005 o 685.205> |
| 2 | 2 | Motoriduttore Gear Motor 2 - 224:1 Offset Shaft – Solarbotics> |
| 3 | 2 | Staffetta codice GMB28 - - Solarbotics> |
| 4 | 2 | Ruote GMPW - Solarbotics> |
| 5 | 1 | Ball caster codice 70144 - Tamiya> |
| 6 | 7 | Distanziale Esagonale M/F 3 MA x L=10 mm |
| 7 | 1 | Batteria tipo NI-MH dimensione 2/3A, tensione nominale 6V, con una capacità minima di 1100mAh> |
| 8 | 1 | Mini convertitore DC/DC prodotto dalla Pololu codice 791> |
| 9 | 1 | Deviatore a slitta |
| 10 | 1 | Presa di alimentazione femmina da pannello |
| 11 | 1 | Dispositivo Pan & Tilt> |
| 12 | 1 | Telecamera dotata di trasmettitore incorporato> |
| 13 | 1 | Scheda Arduino UNO> |
| 14 | 1 | I/O Expansion Shield V5> |
| 15 | 1 | Modulo XBee> |
| 16 | 1 | Motor Control v 3.0> |
| 17 | 1 | Monitor per batteria |
| 18 | 1 | Strip di tipo Maschio/Femmina 6 vie |
| 19 | 2 | Strip di tipo Maschio/Femmina 8 vie |


Pubblicazione del progetto
Il progetto completo del robot ArduinoBOT è stato oggetto di 4 miei articoli pubblicati sulla rivista Fare Elettronica, nei seguenti numeri:
![]()
 |
N° 317 pubblicato nel Novembre 2011 ArduinoBOT (prima parte) – Presentazione |
 |
n° 318 pubblicato nel Dicembre 2011 ArduinoBOT (seconda parte)- Le schede principali |
 |
319 pubblicato nel Gennaio 2012 ArduinoBOT (terza parte) – Costruzione |
 |
N° 320 pubblicato nel Febbraio 2012 ArduinoBOT (quarta parte) – La stazione di controllo |
Per altri avicoli da me pubblicati dall’aprile 2007 al gennaio 2013 sulla rivista Fare Elettronica vedere l’articolo Adrirobot – articoli su rivista Fare Elettronica .

Schema a blocchi del robot
Nella figura è riportato lo schema di collegamento della varie parti che formano il robot.

Alcuni filmati del robot
Schede utilizzate
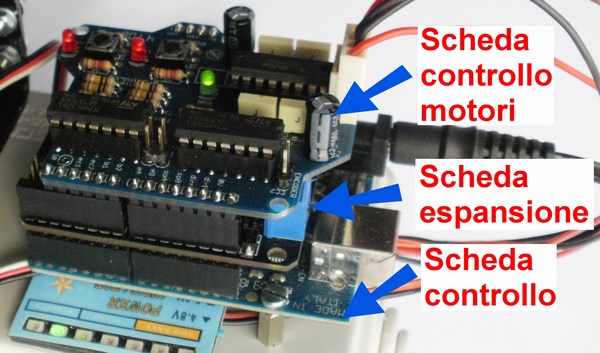
Per la gestione del robot sono utilizzate tre schede:
- Arduino UNO
- DFRobot I/O Expansion Shield V5
- Arduino motor shield
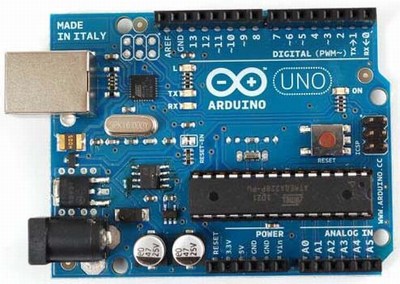
Scheda controllo Arduino UNO
La scheda Arduino UNO R3 , è la più famosa della serie Arduino, esiste sia nella versione con processore montato su zoccolo sia nella versione SMD.
Il cuore della scheda Arduino UNO R3 è rappresentato dal processore ATmega 328 un microcontrollore ad alte prestazioni con bus a 8 bit prodotto dalla Atmel con architettura di tipo RISC (acronimo di Reduced Instruction Set Computer). Per altre informazioni vedere l’articolo Scheda Arduino UNO R3 con ATmega 328
Scheda di espansione I/0
La scheda di espansione utilizzata per Arduino BOT è la DFRobot I/O Expansion Shield V5 la scheda permette l’inserimento di un modulo XBee. A questa scheda vengono inoltre connessi i due servomotori che azionano il dispositivo Pan & Tilt per il controllo della telecamera.
La scheda permette il supporto di : RS485, Xbee (Xbee pro), Bluetooth, APC220, SD card lettura / scrittura.
Per ulteriori informazioni vedere l’articolo Scheda IO Expansion Shield V5
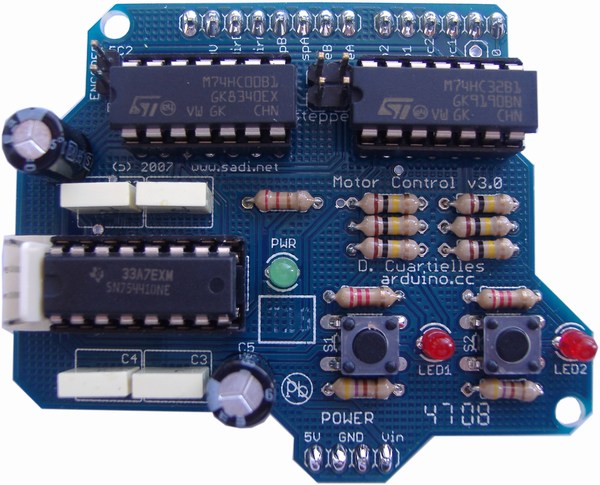
Scheda di gestione dei motori
La scheda motor shield utilizzata per il robot permette collegata alla scheda Arduino UNO di pilotare due motori DC, questa è ora fuori.
I motori possono essere tutti quelli del tipo DC che possono funzionare alla tensione di Vin che è la tensione di alimentazione elettrica della scheda .
Il driver del motore l’integrato SN754410 (L293D-compatible) può sopportare tensioni comprese tra 3.6V a 36V motori (1A). per ulteriori informazioni su questa scheda vedere l’articolo Scheda Arduino motor shield
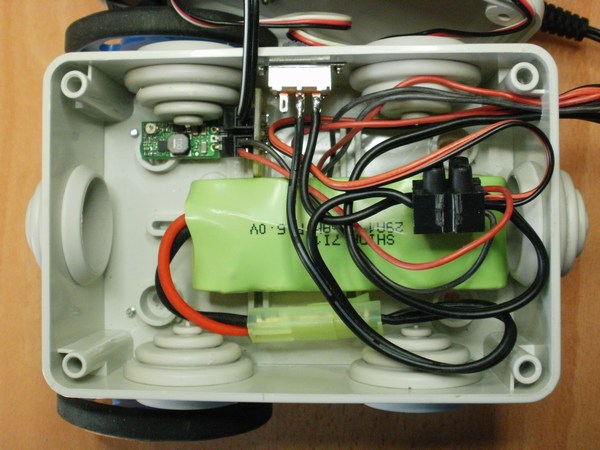
Alimentazione del robot
La batteria è alloggiata nella base del robot, sono di tipo NI-MH dimensione 2/3A, tensione nominale 6V con una capacità di 1100 mAh. Per altre informazioni vedere l’articolo Arduinobot batteria
 Per quest’operazione è prevista una presa di alimentazione femmina da pannello dotata di un interruttore che quando è inserito lo spinotto della caricabatteria, sconnette la batteria dal circuito del robot.
Per quest’operazione è prevista una presa di alimentazione femmina da pannello dotata di un interruttore che quando è inserito lo spinotto della caricabatteria, sconnette la batteria dal circuito del robot.
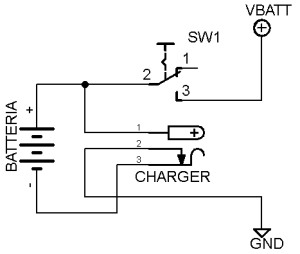
Schema collegamento batteria di alimentazione
Per alimentare la telecamera presente sul robot, occorre elevare la tensione dai 6V a quella di 8V. Per questo è utilizzato un mini convertitore DC/DC prodotto dalla Pololu di dimensioni particolarmente ridotte, che è in grado di convertire una tensione continua compresa tra 1,5 e 16 volt in una tensione di uscita compresa tra i 2,5 a 9,5 volt (regolabile tramite trimmer).
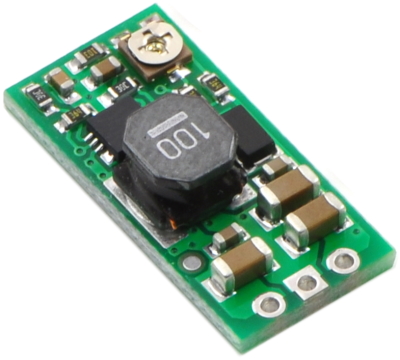
Convertitore DC/DC
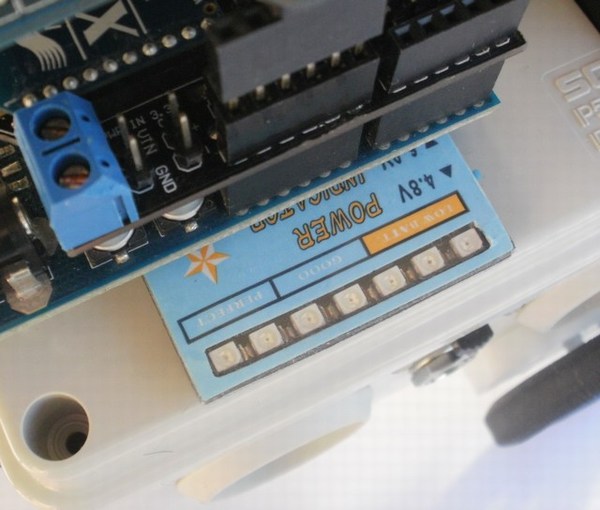
Per la verifica della tensione è presente un misuratore che mostra il valore tramite l’accensione di led
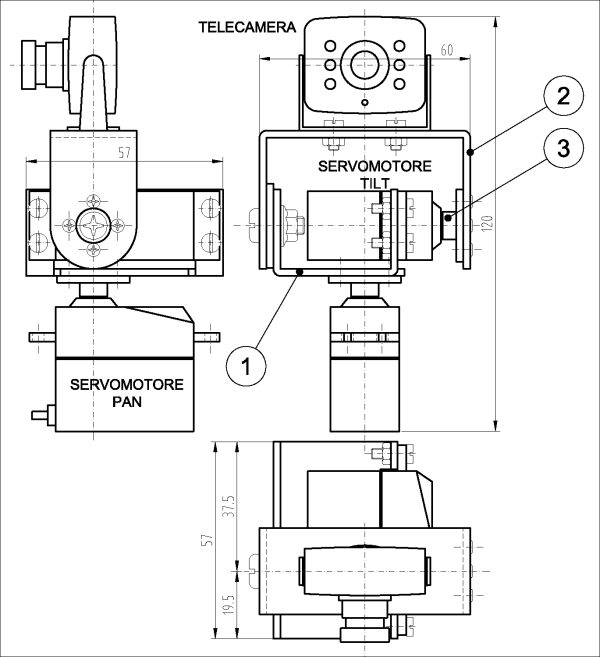
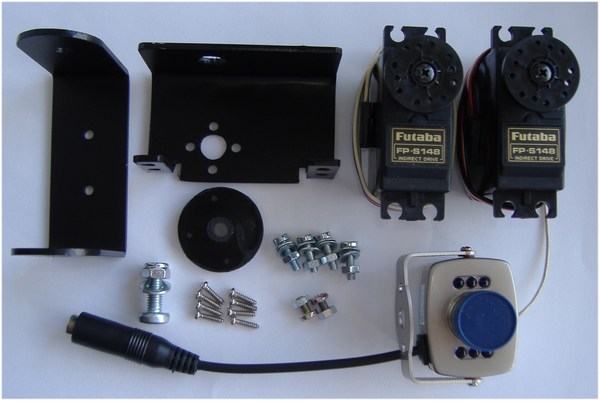
Dispositivo Pan & Tilt per camera
Fa parte del progetto robot ArduinoBOT un dispositivo Pan & Tilt auto costruito su cui è montata una telecamera. Per informazioni vedere l’articolo Arduinobot pan&tilt telecamera

Nel disegno sono elencati tutti i particolari necessari, per le rotazioni si sono utilizzati servomotori della FUTABA modello S148.
Telecamera robot
La telecamera installata sul robot, dato che la sua costruzione risale a prima dell’utilizzo del segnale TV digitale è di tipo CMOS 1/3″ OMNIVISION PAL con una risoluzione di 628 x 582..
La telecamera è molto compatta e forniva una risoluzione di 380 linee TV con audio, alimentata tramite il modulo DC/DC ad una tensione di 9 V. Per altre informazioni vedere l’articolo Telecamera CMOS a colori

Motori e ruote del robot
ArduinoBOT è mosso da due motoriduttori tipo Gear Motor 2 – 224:1 Offset Shaft prodotti dalla Solarbotics. L’albero di uscita ha un diametro di 7 millimetri ed è realizzato in doppio piatto. Il motoriduttore è fornito di una frizione che entra in funzione a 0,43 Nm evitando il blocco dell’albero.
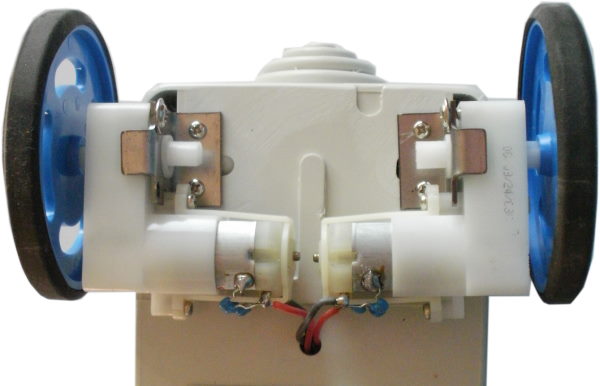
Le ruote del Robot hanno un diametro di 65 mm (Figura 11) realizzate in ABS stampato e sono prodotte dalla Solarbotics codice GMPW, queste si adattano perfettamente all’albero di uscita del motoriduttore Gear Motor. Per altre informazioni vedere l’articolo Arduinobot ruote

Il supporto posteriore è rappresentato da una ball caster codice 70144 prodotta dalla Tamiya.
Per altre informazioni vedere l’articolo Arduinobot ruote

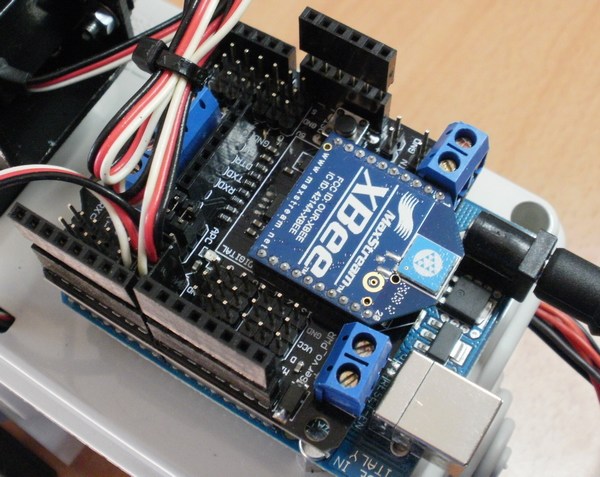
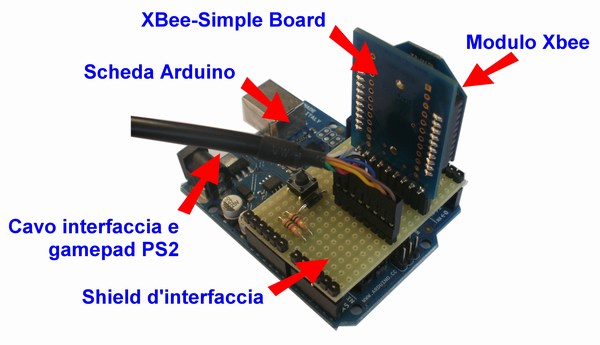
Stazione di controllo robot
A completare il progetto di ArduinoBOT, troviamo la stazione di controllo del robot che utilizza una seconda scheda Arduino come base, su di essa è montato un piccolo shield che permette l’interfacciamento di un modulo Xbee e di un controller per console playstation 2. In questo modo non è necessario essere direttamente connessi a un PC per il controllo del robot.
Per altre informazioni vedere l’articolo Arduinobot stazione controllo
 La stazione di controllo è formata dai seguenti elementi:
La stazione di controllo è formata dai seguenti elementi:
- Scheda Arduino
- Shield d’interfaccia
- Scheda supporto Xbee – Simple Board con installato un modulo Xbee
- Cavo interfaccia tra shield e Controller
- Controller PS2
Programmi di gestione robot
Per il controllo del robot occorrono due programmi: uno per la stazione di controllo e uno per il robot.
Il primo permette l’interfacciamento del controller, che secondo il tasto premuto invia tramite il modulo Xbee un carattere verso il robot.
Il secondo programma converte il carattere ricevuto in comandi che andranno ad attivare i motori del robot oppure i servi per muovere il dispositivo pan & tilt su cui è montata la telecamera.
I programmi dovranno essere trasferiti sulla memoria del processore della scheda Arduino tramite l’apposito programma IDE.
Per il funzionamento occorre sia anche scaricata l’apposita libreria per la gestione del Controller.
Per gli sketch vedere il, relativo articolo Arduinobot programmi
