

Il kit proposto da Elegoo denominato Tumbller è un kit per la costruzione di un robot autobilanciate di nuova concezione
Il robot possiede molteplici affascinanti funzioni come:
- Auto inseguimento in avanti
- Auto inseguimento all’indietro
- Aggiramento degli ostacoli
- Funzione Bounce che permette il “parcheggio” del robot e il relativo ritorno in posizione eretta
- Effetti luminosi
Il controllo del robot è possibile anche tramite uno smartphone con collegamento Bluetooth usando l’ APP ELEGOO TOOL BLE.
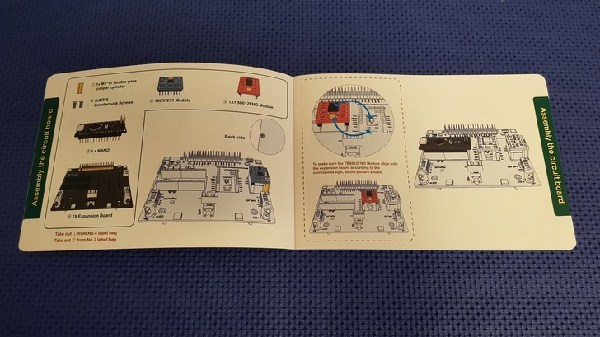
Il kit robot Tumbller Elegoo è fornito di un tutorial con molte illustrazioni, che mostra come assemblare il kit passo dopo passo e come utilizzare tutte le interessanti funzioni.

Indice
Presentazione del robot
Kit STEM (dall’inglese Science, Technology, Engineering and Mathematics) per tutti: Tumbller è facile da assemblare e adatto ai bambini per fare esperienze pratiche e apprendere conoscenze di programmazione di base. Anche gli appassionati di robot professionali possono divertirsi personalizzando e aggiungendo più funzioni a questo kit.
La scheda di controllo è compatibile con Arduino: è possibile modificare i codici predefiniti e caricare il proprio programma utilizzando l’IDE e lavorare con i pin riservati per aggiungere più sensori.
Pacchetto e garanzia: tutte le parti e i componenti sono ben protetti in ogni scatola e contenuti nella confezione esterna. Viene offerta una garanzia di qualità di un anno.




Dove acquistare il kit robot
Il kit del robot potrà essere acquistato tramite il sito Amazon, basterà cliccare sul link sottostante

Contenuto della confezione

 ga
ga
Tutto il materiale è contenuto in 4 scatole distinte
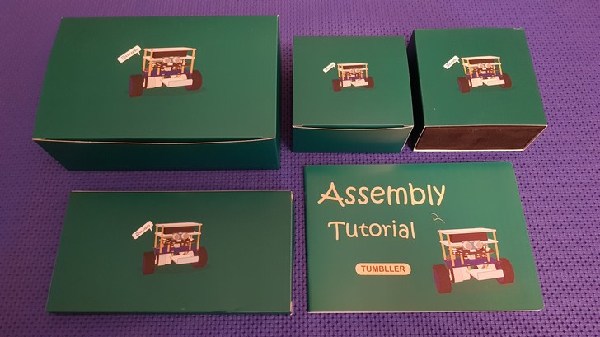

La scatola più grande contiene i caricabatterie , il porta batterie, da scheda di controllo su cui sono già montati: la scheda Nano e il modulo controllo motore, il cavo di programmazione, le due ruote e i due cavi per i motori; nella busta dei cavi è presente il cacciavite da utilizzare per il montaggio.

Una scatola più piccola contiene la minuteria meccanica divisa in buste con indicazione delle misure e della quantità, le staffe per il supporto dei motori, le due batterie, la staffa di carbonato, il sensore sonar e il modulo Accelerometro GY-521


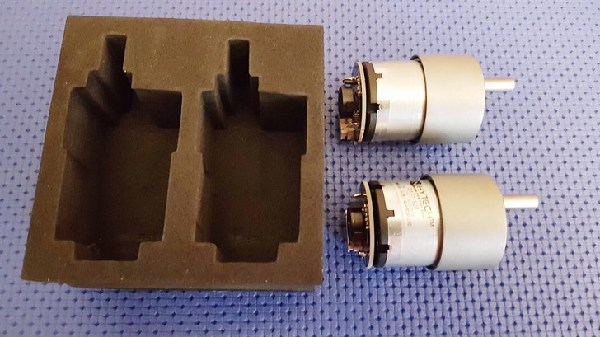
I due motori sono posizionati all’interno di una scatola con del materiale di protezione per evitare danneggiamenti
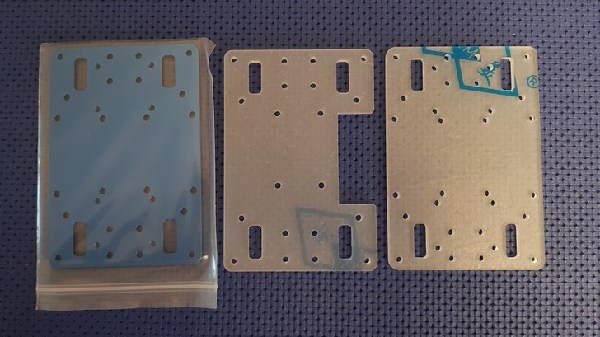
Una scatola contiene il lamierino per i due motori e due piani in carbonato per la struttura del robot
La scheda di controllo è contenuta in una busta per evitare le cariche elettrostatiche

Scheda controllo
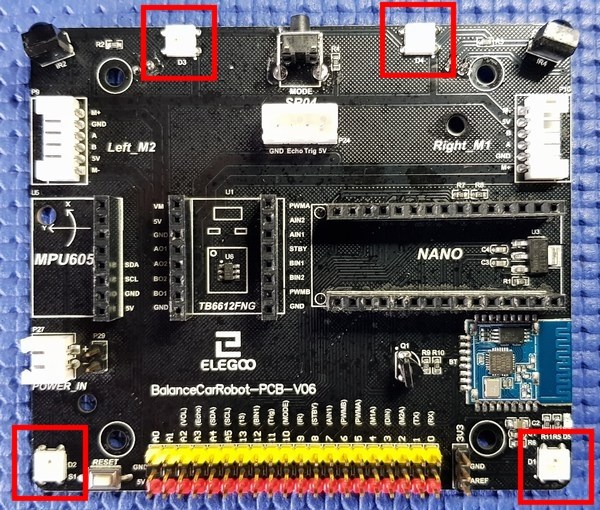
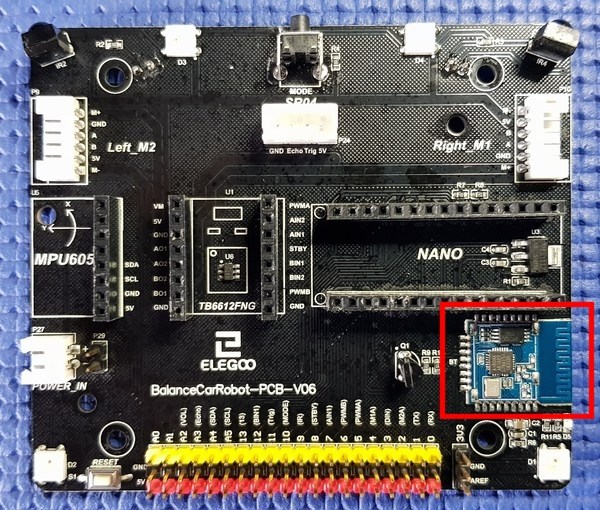
La scheda controllo presente nel kit robot Tumbller Elegoo è denominata BalanceCarRobot-PCB-V06 del robot misura 93×82 mm.
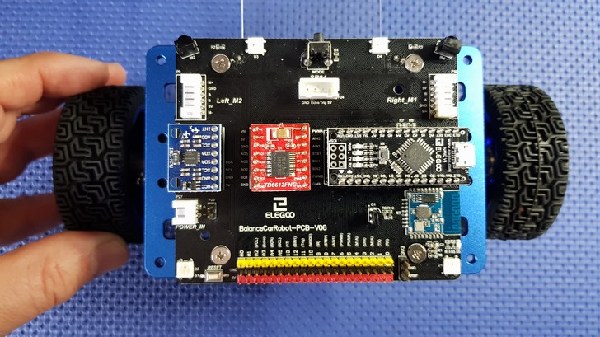
su di esso sono presenti sia componenti e moduli già cablati sia i connettore per moduli da installare successivamente. A questa categoria appartengono:
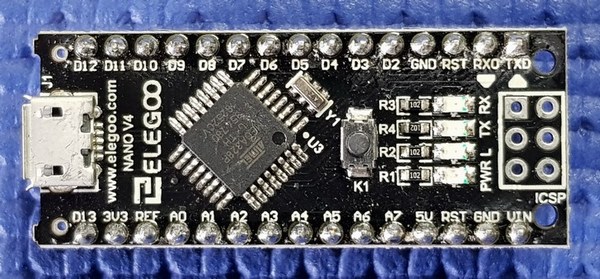
- Scheda controllo Nano V4
- Modulo controllo motore con TB6612FGN
- Sensore Accelerometrico GY-521
- Modulo sonar HC-SR04
Sulla scheda sono invece già montati:
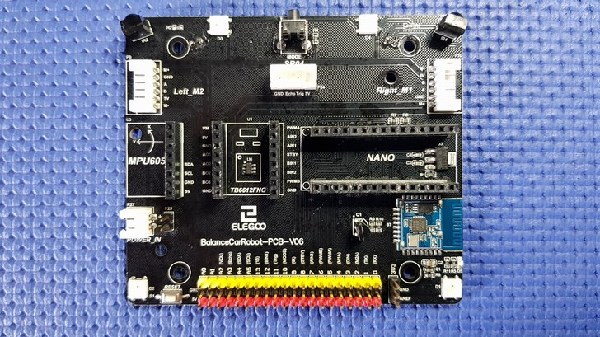
Vista superiore della scheda senza i moduli montati
Nella parte sottostante al modulo motore, è presente l’integrato U6 con sigla SMD C145, rappresenta un SN74LVC2G14 Dual Schmitt-Trigger Inverter, probabilmente utilizzato per adattare i segnali per la gestione dei motori.

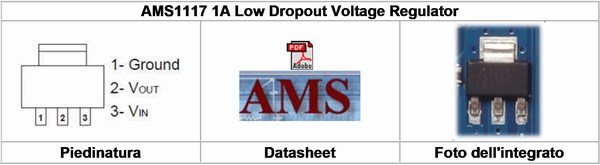
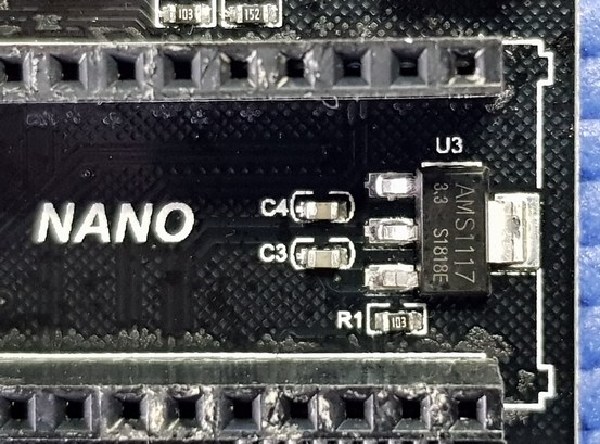
Nella parte sottostante alla scheda di controllo NANO è presente l’integrato U3 che è un regolatore AMS1117 con uscita a 3,3V con relativi condensatori C3 e C4
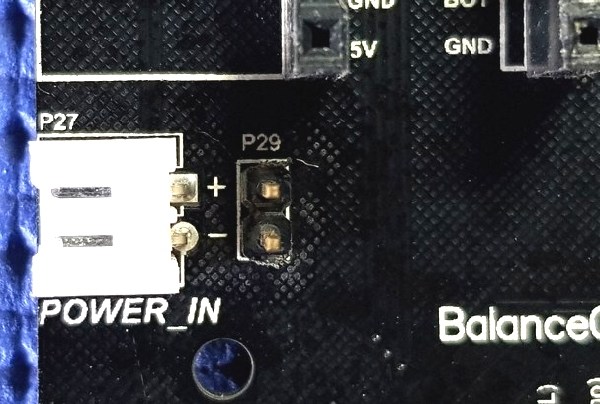
Al connettore P27 è collegata la fonte di alimentazione rappresentata da due batterie tipo 18650 di tipo Li-ION da 3,7 V in serie per un totale di 7,4 V; a lato del connettore è presente anche il connettore P29 da cui eventualmente è possibile prelevare la stessa tensione.
A lato del led RGB D2, troviamo il tasto S1 con funzione di RESET per inizializzare la scheda controllo nel caso di malfunzionamento.

Nella parte inferiore della scheda è presente un connettore su cui sono riportati alcuni pin, tra i quali quelli del Bus I2c, RX e TX, i pin del modulo sonar, i pin delle porte analogiche, i pin del modulo motore.

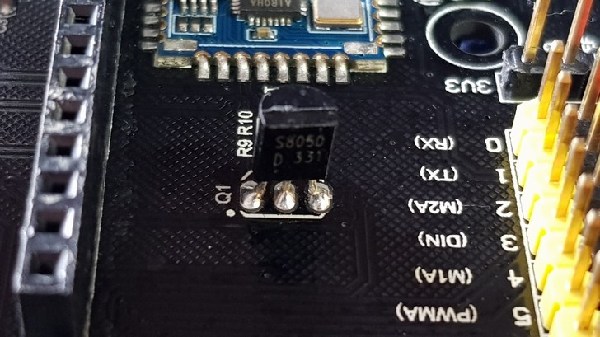
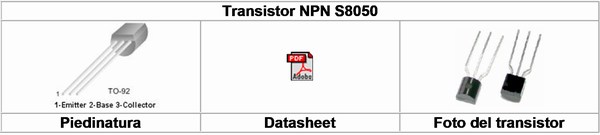
Nelle vicinanze del modulo bluetooth, è presente il transistor NPN Q1 tipo S8050, che è utilizzato probabilmente per adattare i segnali verso il modulo BT.
A lato del led RGB D1, troviamo un connettore da cui è possibile prelevare una tensione di 3,3 Volt; è presente un pin collegato alla scheda NANO al relativo pin AREF, che configura la tensione di riferimento usata per gli input analogici ( il valore usato come massima tensione in ingresso )

Scheda controllo Nano V4
Quello qui presentato è un clone della scheda Arduino Nano prodotta dalla Elegoo, non è disponibile il circuito elettrico, anche se a prima vista sembra del tutto simile a quello originale. Per maggiori informazioni vedere il link.
![]()
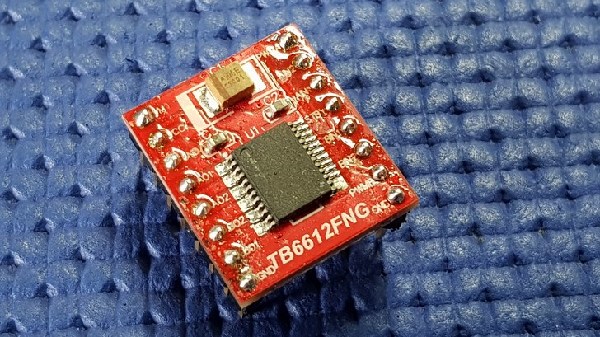
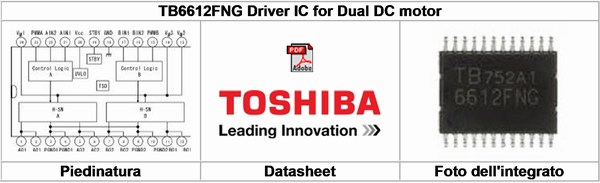
Modulo controllo motore con TB6612FGN
Il modulo di controllo motore scelto per il l kit del robot Tumbller Elegoo è basato sull’integrato TB6612FNG prodotto dalla Toshiba ed è in grado di pilotare due motori a corrente continua con una corrente costante di 1.2A (3.2A di picco) interfacciandosi con un microcontrollore. Può anche essere utilizzato per controllare un singolo motore passo-passo bipolare.

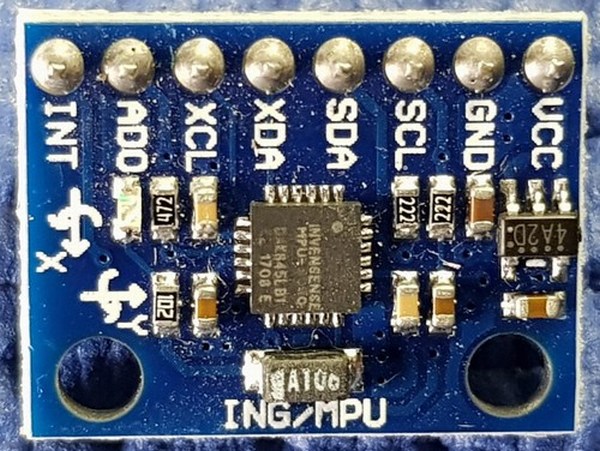
Sensore Accelerometrico GY-521
Il modulo GY-521 è costruito per gestire il sensore MPU-6050 che è un chip prodotto da Invensense: combina al suo interno più dispositivi tra i quali:
- un accelerometro a 3 assi
- un giroscopio a 3 assi
- un sensore di temperatura
- un processore di movimento digitale
Il modulo è di piccole dimensioni: 21.2 x 16.4 x 3.3 mm, ed è molto preciso. Consiste in un hardware di conversione da analogico a digitale per ciascun canale, acquisendo allo stesso tempo gli assi x, y, z.
L’uscita può essere interfacciata con il bus I2C di Arduino. Per maggiori informazioni vedere il link.
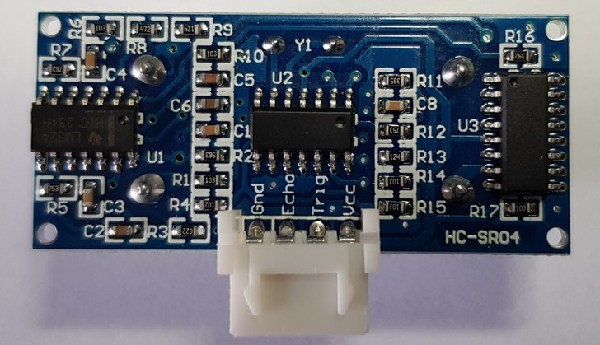
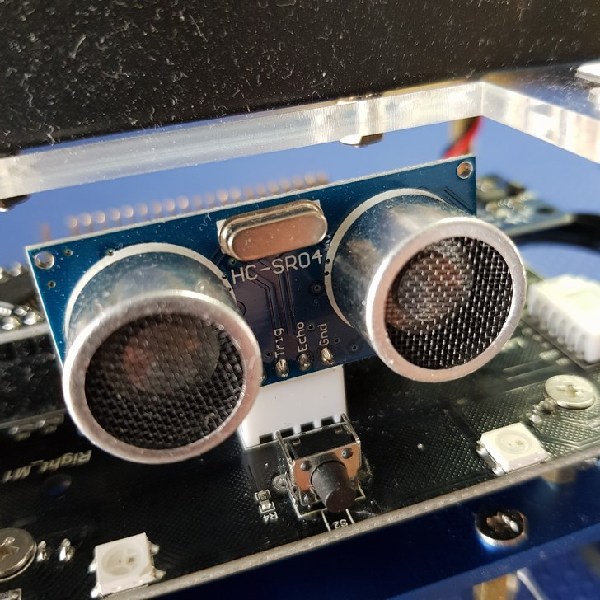
Modulo sonar HC-SR04
Il sensore ad ultrasuoni utilizzato dal robot è il modello HC-SR04. Il sensore ha un campo di misura che si estende da due centimetri a quatto metri e la precisione arriva a 1 cm. Il modulo comprende il trasmettitore a ultrasuoni, il ricevitore e il circuito di controllo.
Questi sensori ad ultrasuoni non misurano direttamente la distanza, ma forniscono il tempo impiegato da un segnale sonoro per raggiungere un ostacolo e ritornare di nuovo al sensore.

Quando la scheda di controllo setta a 1 il Pin Trigger, il sensore invia 8 impulsi ad ultrasuoni. Quando questi poi sono ricevuti, il sensore setta a 1 il pin Echo, viene quindi misurato il tempo che passa tra l’attivazione del pin Trigger ed il settaggio del pin Echo. Infine, nota la velocità del suono, converte il tempo misurato in una lunghezza e ricava quindi la distanza dell’ostacolo.
Per maggiori informazioni vedere il link.

Vista frontale del sensore

Vista posteriore del sensore
Sensore montato sulla scheda di controllo
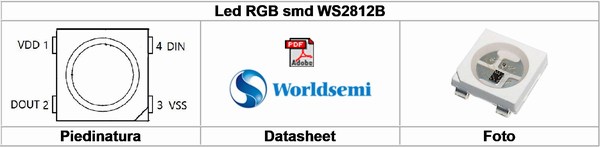
Led WS2812B
Sulla scheda sono montati 4 diodi led tipo WS2812B prodotti dalla WorldSemi. Sono dei led RGB che presentano un corpo smd 5050. Al loro interno hanno un regolatore di luminosità a corrente costante che assicura un colore costante anche con differenti tensioni di alimentazione.
I Led possono essere programmati con diversi colori tramite un protocollo ad 1 bit. Per il pilotaggio sono utilizzati solo 3 pin, due per l’alimentazione e uno per la programmazione.
Con questi led è possibile accendere, con differenti colori uno per ogni led, anche più di 500 led contemporaneamente (frequenza di trasmissione dei dati 400 kHz). L’unico limite sono le resistenze dei fili che portano l’alimentazione e la velocità con cui vogliamo cambiare i colori dei led.
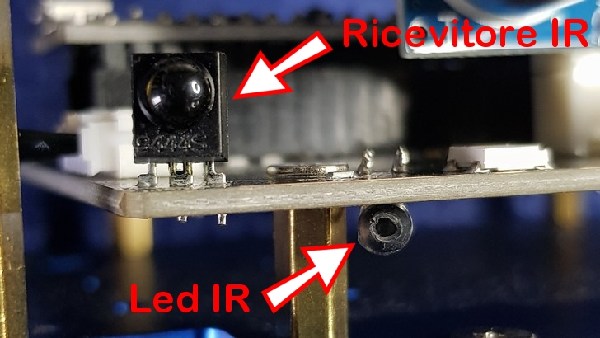
Una coppie di led IR e relativo ricevitore
Sulla scheda di controllo sono montati una doppia coppia di Led emittente IR nella parte sottostante e Ricevitore IR nella parte superiore, questi possono essere utilizzati per localizzare ostacoli posti frontalmente al robot.

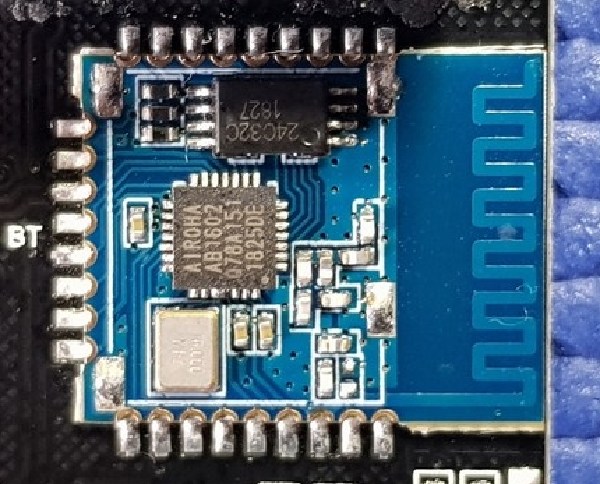
Modulo Bluetooth tipo BT16 4.2
Sulla scheda di controllo è già saldato un modulo Bluetooth tipo BT16 4.2, che utilizza il nuovo chip AB1602 Bluetooth 4.2 BLE di Airoha,
Il modulo di trasmissione trasparente Bluetooth supporta la modalità di comando seriale, utilizzata per raggiungere l’MCU esterna e l’interazione del modulo. Si può utilizzare il comando porta seriale per configurare i parametri e alcuni controlli, come modificare l’UUID ( Universally unique identifier), modificare il nome Bluetooth, controllare la disconnessione Bluetooth, ecc.
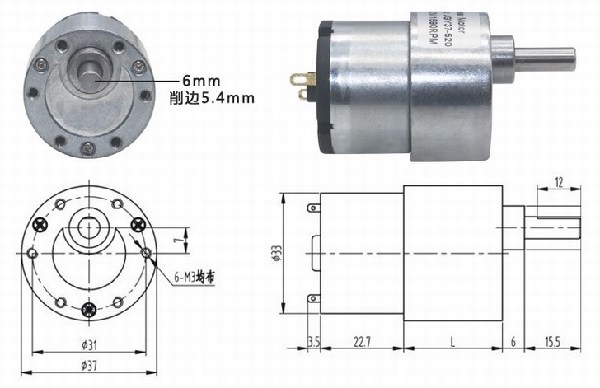
Motori del robot
Le ruote del robot Tumbller sono azionate da due motoriduttori GA37-520, questi hanno le seguenti caratteristiche:
- Potenza nominale: 7W
- Tensione nominale : 12 ( V ) corrente nominale 0,5 ( A )
- Velocità nominale : 360 ( rpm )
- Coppia nominale : 2,5 ( NM )

Calettato sull’albero del motore elettrico è montato un rotore su cui sono presenti dei magneti. Il loro campo magnetico è rilevato da due sensori magnetici ad effetto di Hall tipo 3144, con uscita digitale che cambia il suo valore in presenza di un campo magnetico.
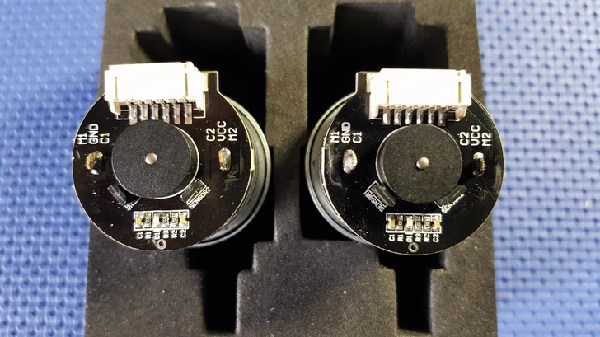
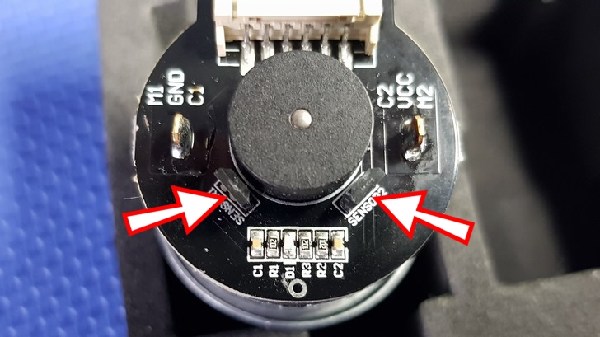
Si avranno due stati logici:
- Assenza campo magnetico → il piedino d’uscita e’ a HIGH
- Presenza campo magnetico → il piedino d’uscita e’ a LOW, tale livello logico viene segnalato dall’accensione del led presente sul modulo.
Questi sensori permettono al programma di gestione di sapere in quale direzione sta ruotando il motore e il relativo numero di giri.

Batterie 18650 e relativo caricabatterie
All’interno del kit robot Tumbller Elegoo sono presenti due batterie 18650 agli ioni di litio con il portabatterie e relativo caricabatterie.
Come detto le batterie sono del tipo agli Ioni di litio, la cui tensione di lavoro si aggira attorno i 3,6-3,7 volt, con una corrente di 2200 mA, per una potenza erogata di 8.15 Wh.
 É sconsigliabile che questo tipo di batterie sia scaricata oltre i 2,5 volt, soglia che potrebbe rendere la cella inutilizzabile . Va caricata a una tensione di 4,2 V, 4,3 V massimi, una tensione maggiore la renderebbe pericolosamente soggetta a esplosione. La sua percentuale di efficienza decade all’incirca dell’1% ogni anno. Le sue misure si aggirano sui 65 mm per 18 di diametro (da cui la sigla che le identifica).
É sconsigliabile che questo tipo di batterie sia scaricata oltre i 2,5 volt, soglia che potrebbe rendere la cella inutilizzabile . Va caricata a una tensione di 4,2 V, 4,3 V massimi, una tensione maggiore la renderebbe pericolosamente soggetta a esplosione. La sua percentuale di efficienza decade all’incirca dell’1% ogni anno. Le sue misure si aggirano sui 65 mm per 18 di diametro (da cui la sigla che le identifica).
Il caricabatteria fornito è il modello KJ186-12, che,come riportato sulla etichetta, può essere alimentato con una tensione alternata compresa tra 100 e 240V 50.50 Hz, con una corrente di 200 mA, la tensione in uscita è di 4,2V-1A oppure 500 mA se sono in carica 2 batterie.
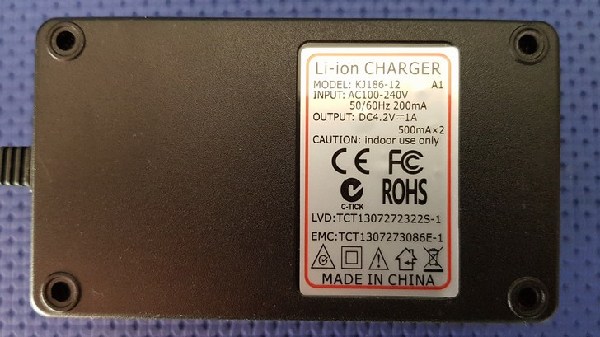
Vista interna del caricabatteria

Appena inserite, il led relativo alla batteria si accenderà di colore rosso, passando al blu a batteria carica.


Montaggio del robot
Per le fasi del montaggio potete leggere l’articolo Montaggio del Robot Tumbller di Elegoo, troverete tulle le informazioni necessarie.
