

Nel robot la scheda madre DeA BASIC Stamp® Board svolge un ruolo fondamentale nel robot Panettone.
I vari componenti erano allegati ai fascicoli n° 11-12-13-21
Su questa scheda sono raccolti gli elementi che costituiscono Il “cervello elettronico” dei robot. In particolare il chip della memoria, che immagazzina i programmi PBASIC, e il microcontrollore BS/2, che permette al robot dì elaborare le informazioni ed eseguire i programmi presenti in memoria.
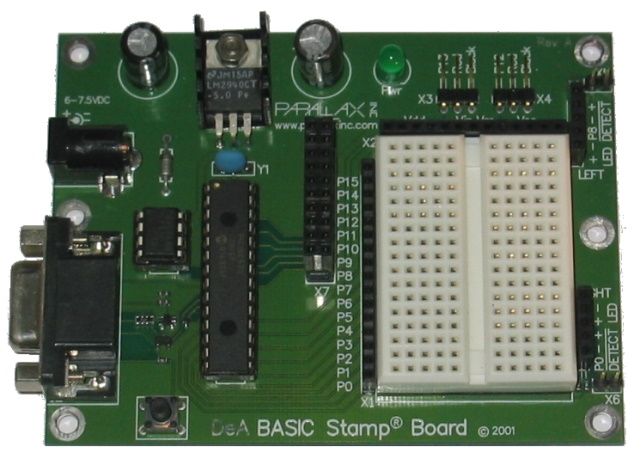 La scheda madre del robot Panettone inoltre, è predisposta per ospitare i sensori (a infrarossi e di contatto), che consentono al robot di interagire con l’ambiente circostante, e la breadboard, una piattaforma di sperimentazione che offre la possibilità di realizzare piccoli circuiti per lo svolgimento di svariati esperimenti di elettronica.
La scheda madre del robot Panettone inoltre, è predisposta per ospitare i sensori (a infrarossi e di contatto), che consentono al robot di interagire con l’ambiente circostante, e la breadboard, una piattaforma di sperimentazione che offre la possibilità di realizzare piccoli circuiti per lo svolgimento di svariati esperimenti di elettronica.
Vedremo poi come, combinando la scheda madre con la scheda di controllo motori, si possano controllare i movimenti dei due motori a spazzola.
La DeA BASIC Stamp® Board rappresenta quindi l’indispensabile base per il funzionamento di tutti gli altri componenti elettronici dei robot, ma anche per lo sviluppo delle sue potenzialità.
Questa scheda può essere potenziata utilizzando le istruzioni riportate alla pagina Come potenziare la Scheda BS2 trasformandola in una BS2 SX
 Fascicolo n°11 |
  |
|
 Fascicolo n°12 |
|
|
 Fascicolo n°13 |
 |
|
 Fascicolo n°21 |
 |
|



Indice
Descrizione scheda madre DeA del robot Panettone
Connettore DB9 [1]
La scheda può comunicare con il computer grazie alla porta seriale DB9 a 9 pin, questa consente di scaricare dal PC al chip di memoria del robot i programmi che successivamente il microcontrollore eseguirà.
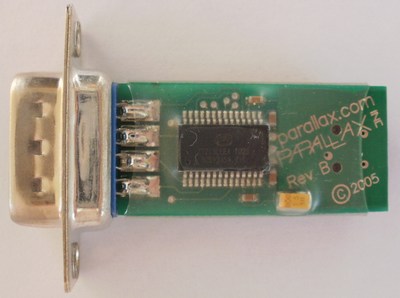
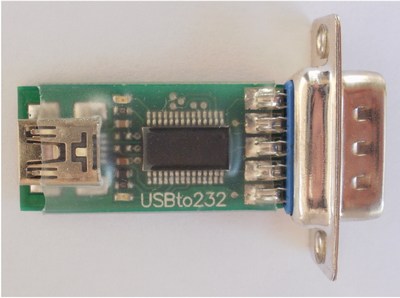
Dato che attualmente questa porta non è più presente sui PC, occorre utilizzare un convertitore USB/Seriale. Data la tipologia della porta della scheda DeA Basic Stamp non tutti i modelli sono utilizzabili.
Quello che consiglio è l’adattatore USB to Serial è prodotto dalla Parallax, l’adattatore che è compatto ed economico fornisce una porta COM virtuale per tutti i progetti che hanno un connettore DB9 (a 9 pin) seriale. I driver USB per Windows sono inclusi nelle ultime versioni del pacchetti software IDE BASIC Stamp, Si possono anche scaricare i driver di Windows separatamente dal sito Parallax oppure i driver per altri sistemi operativi direttamente da FTDI.

 Memoria EEprom [2]
Memoria EEprom [2]
La scheda DeA Basic Stamp Board monta un chip di memoria EEPROM di 2048 byte di capacità, per lo sviluppo del programma, non espandibili. Il modello utilizzato e il 24LC16B prodotto dalla Microchip.
Il chip si presenta con un contenitore a 8 pin.
| Numero pin | Descrizione |
|---|---|
| 1 | A0 - Non connesso |
| 2 | A1 - Non connesso |
| 3 | A2 - Non connesso |
| 4 | Vss - Contatto di massa? |
| 5 | SDA - Serial Address/Data I/O? |
| 6 | SCL - Serial Clock? |
| 7 | WP - Write Protect Input? |
| 8 | Vcc - Contatto di alimentazione positiva |
 |
 |
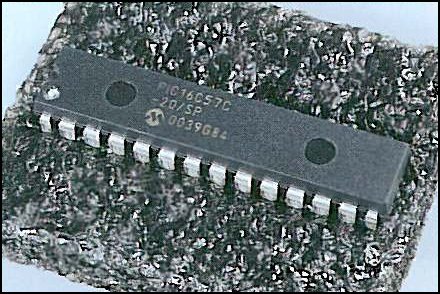
Il microcontrollore [3]
il microcontrollore utilizzato in questo robot è un chip PIC16C57C (di cui è proprietaria l’industria Microchip), che è il vero e proprio controllore, sul quale è stato integrato l’interprete del linguaggio PBASIC (ossia Parallax Basic, un’estensione dei linguaggio BASIC realizzata dalla Parallax )chip e interprete, insieme, formano il circuito proprietario BASIC STAMP 2 di Parallax.
 L’interprete
L’interprete
L’interprete opera da interfaccia tra il programma PBASIC, memorizzato nella EEPROM, e il microcontrollore.
In ingresso avremo le istruzioni PBASIC che saranno tradotte in una sequenza di istruzioni elementari da fornire, in uscita, al microcontrollore.
Ogni microcontrollore possiede infatti un insieme di istruzioni elementari, detto instruction set, con cui è possibile programmarlo. Il linguaggio di tali istruzioni, il cosiddetto linguaggio macchina, tuttavia, e un linguaggio di basso livello, complesso e poco intuitivo. Programmare il tuo robot fornendo direttamente al microcontrollore le istruzioni elementari, quindi, sarebbe molto difficoltoso. Grazie all’interprete, invece, potrai dialogare con Il microcontrollore In un linguaggio ad alto livello come il BASIC, che utilizza istruzioni più vicine alla logica dei linguaggio umano, in modo da ottenere programmi di più facile comprensione.
Il PBASIC
Ogni istruzione PBASIC verrà poi tradotta dall’interprete in una sequenza più o meno lunga di istruzioni elementari, comprensibili al microcontrollore.
Si può immaginare che un’istruzione ad alto livello, come “apri la porta”, sia tradotta in una sequenza di istruzioni elementari di basso livello, quali ‘inserisci la chiave, poi girala, ora abbassa la maniglia e spingi la porta”.
In realtà, il linguaggio PBASIC è un linguaggio ibrido, in quanto Parallax ha apportato al BASIC standard una serie di modifiche che riguardano principalmente una gestione a più basso livello delle porte di I/0 (corrispondenti ad alcuni dei 28 piedini del microcontrollore), rendendo in questo modo possibile anche una gestione più efficiente di sensori e attuatori.

Pulsante START/STOP [4]
il tasto start/stop, che controlla il programma presente nella memoria del robot. Questo pulsante permette Infatti di attivare o di interrompere l’esecuzione di un programma, senza però che tali operazioni di controllo comportino la cancellazione del programma dalla memoria.

Morsetto di alimentazione [5]
attraverso il quale la scheda viene alimentata, questo attraverso un apposito cavo collegato alla scheda di raccolta cavi e quindi alle batterie. Anche in questo caso, togliendo l’alimentazione dalla scheda, il programma presente nella memoria del robot non verrà cancellato

Integrato di regolazione [6]
l’integrato utilizzato nel circuito di regolazione è un LM2940 prodotto dalla National Semiconductor.
Caratterizzato da una bassa tensione di drop-out (0,5 – 1V) l’integrato è in grado di fornire una corrente di 1A, è inoltre protetto contro l’inversione di polarità in ingresso.
LED [7]
il led di colore verde si illumina quando la scheda madre è alimentata.

Connettore di espansione [8]
Al centro della scheda madre dea del robot Panettone è posto il bus di espansione contrassegnato dalla sigla X7. Il bus è realizzato con uno slot con 20 pin.
Ad esso può essere collegata la scheda di controllo motori, che permetterà al microcontrollore di governare i due motori a spazzola oppure altre schede per il controllo di nuovi dispositivi.

| Pin | Utilizzo | Pin | Utilizzo |
|---|---|---|---|
| 1 | Contatto di massa | 11 | Porta P8 |
| 2 | Contatto di massa | 12 | Porta P9 |
| 3 | Porta P0 | 13 | Porta P10 |
| 4 | Porta P1 | 14 | Porta P11 |
| 5 | Porta P2 | 15 | Porta P12 |
| 6 | Porta P3 | 16 | Porta P13 |
| 7 | Porta P4 | 17 | Porta P14 |
| 8 | Porta P5 | 18 | Porta P15 |
| 9 | Porta P6 | 19 | Contatto Vin |
| 10 | Porta P7 | 20 | Contatto Vdd? |
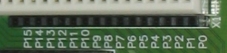
Connettore ingressi/uscite [9]
Alla destra dei bus di espansione X7, si trova uno slot con 16 socket, contrassegnato con la sigla X1.
Ogni socket è identificato con una P, seguita da un numero progressivo, da 0 a 15
Connettore alimentazione [10]
Disposto in orizzontale e contrassegnato con X2, si trova uno slot con 13 socket suddivisi in più gruppi: 5 socket Vdd, 2 Vin, 1 Vm e altri 5 Vss.
Queste sigle indicano l’alimentazione dei socket Vin sono collegati alla tensione di alimentazione i Vss sono collegati a terra (e hanno quindi tensione zero) e i Vdd sono collegati alla tensione controllata dal regolatore di tensione; il socket Vm servirà invece per alimentare i servomotori.
![]()
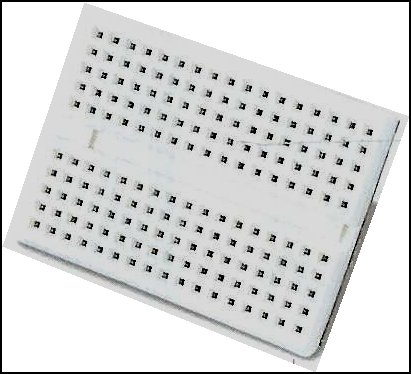
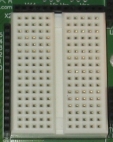
Breadboard [11]
Si tratta di un supporto di plastica che ospita tanti socket collegati tra loro da sottili piste in rame, presenti nella parte inferiore dei supporto.
Combinando la breadboard con la scheda madre si realizza una sorta di “piano di lavoro” su cui creare piccoli circuiti elettrici per potenziare e sviluppare ulteriormente le risorse del robot.
Contatti per alimentazione servomotori [12]
A questi pin vanno collegati i servomotori questi sono dotati di una morsettiera con tre fili
Connettore X3 Pin Denominazione 1 Segnale Porta P12 (bianco) 2 Positivo alimentazione (rosso) 3 Negativo alimentazione (nero) Connettore X4 Pin Denominazione 1 Segnale Porta P13 (bianco) 2 Positivo alimentazione (rosso) 3 Negativo alimentazione (nero)
Slot per sensore ad infrarossi [13]
Ogni slot è composto da un gruppo di 3 socket (indicato con DETECT) e da uno di 2 socket (denominato LED). In questi slot verranno alloggiati i sensori a infrarossi- un LED emettitore dei segnale a infrarossi e un diodo ricevitore (il vero e proprio sensore) che, in presenza di ostacoli, riceve il segnale riflesso.
TSUS4300 Diodo emittente ad infrarosso, 950 nm, GaAs
Connettori sensori di contatto [14]
A lato ai connettori per i sensori a infrarossi si trovano i due connettori siglati X5 e X6, per i sensori di contatto (detti baffi). Questi sono formati da una lamella d’acciaio che deformandosi al contatto di un ostacolo si comporta come un’ interruttore.


Schema elettrico della scheda
Dettaglio schema porta seriale per collegamento con PC

Scheda originale della Parallax
La scheda madre del robot Panettone DeA Basic Stamp è derivata dall’originale Board of Education USB , che può essere sostituita, per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda DeA. Questa presenta già la possibilità di collegamento tramite USB.
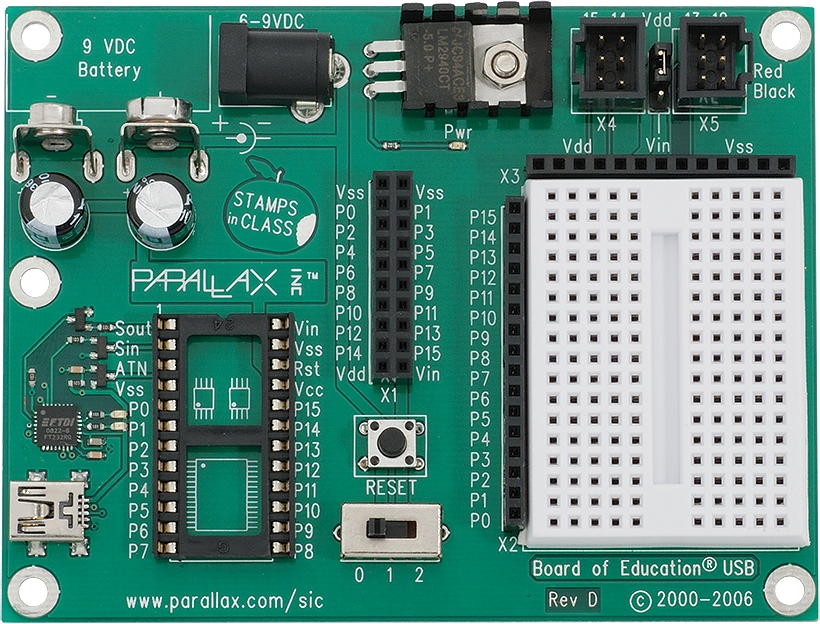
Il processore utilizzato però è diverso da quello fornito con l’opera DeAgostini, in quanto è il BASIC Stamp® 2 (BS2) è un modulo ibrido chiamato “Stamp” semplicemente perché il suo layout e le sue dimensioni sono comparabili a quelle di un francobollo.


Alcune caratteristiche della scheda:
- Prese di alimentazione per batteria a 9 V
- Prese di alimentazione con jack da 2.1 mm per alimentatore
- Regolatore + 5Vcc a bordo
- Connettore USB per la programmazione del BS2-IC e comunicazione con il PC
- Area prototipale bread borad per sperimentazione immediata
- 16 pin di I/O P0 – P15 , su strip femmina, adiacenti all’area prototipale
- Alimentazione Vdd e Vss sono adiacenti all’area prototipale
- Connettore femmina per moduli applicativi opzionali App Mods (compatibile con quella DeA)
- misure: 77 mm X 102 mm
- Fornita con BS2-IC
- Si può utilizzare con il Boe-Bot ed anche sul Robot DeAgostini al posto della scheda originaria
