
Dopo aver costruito la scheda di controllo del robot Little Bot, passiamo ora ad analizzare le fasi di costruzione del telaio del robot.

Tag: robot autocostruiti
LittleBOT – Fasi di montaggio del telaio robot
BUG – Progetto di un robot con DeA Basic Stamp
In questo articolo viene presentata la costruzione del robot BUG uno dei tanti da me costruiti, gli altri li potete trovare elencati nell’articolo Progetti completi di robot autocostruiti da adrirobot.
Il robot deve il suo nome alla vaga rassomiglianza con un insetto dotato dalle sue “antenne”. Per l’assemblaggio del robot si è ricorso ai componenti derivati dalle opere a fascicoli “COSTRUISCI E PROGRAMMA IL TUO ROBOT” con cui si assemblava il robot Panettone da cui si si è ricavata la DeA Basic Stamp come scheda di controllo.
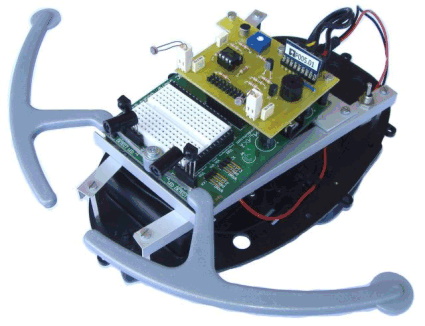
Il telaio è invece stato ricavato dall’opera “Ultimate Real Robot” con cui si costruiva il robot Cybot (telaio e gruppo motoriduttori) entrambe le opere edite dalla DeAgostini.
Nel montaggio sono previste due configurazioni.
ArduinoBOT Progetto completo del robot
Vediamo in questo articolo il progetto completo del robot ArduinoBOT. Il robot di tipo esploratore è basato sulla Scheda di controllo Arduino UNO, per muoversi utilizza due ruote in ABS azionate da due motoriduttori che sono comandati (nel primo prototipo) da una scheda che utilizza L293 auto costruita , mentre nella versione definitiva da una scheda motor shield.

PCB a partire da 2$ per 5 pezzi
