

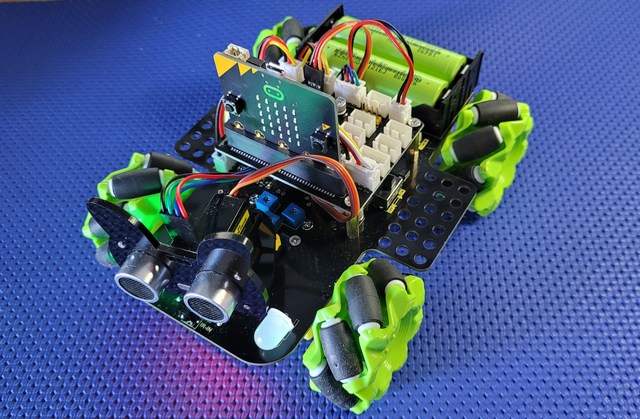
In un precedente articolo è stato presentato il robot 4WD Mecanum Robot della Keyestudio codice KS4034, vediamo ora le operazioni di montaggio.

Indice
Componenti presenti nel KIT
All’interno della confezione troverete tutti i componenti necessari al montaggio del robot. Per le varie fasi di montaggio si può fare riferimento al documento che può essere scaricato da sito WIKY della Keyestudio oppure direttamente da questo link.


Video dell’unboxing

Elenco componenti
| n° | Immagine | Descrizione | Q.tà | Note |
| 1 |  |
Pannello acrilico T=3mm | 1 | Per fissaggio sonar |
| 2 |  |
Pannello acrilica con fori Lego T=3mm | 1 | Per fissaggio staffa unità sonar |
| 3 |  |
Distanziali per motore | 4 | |
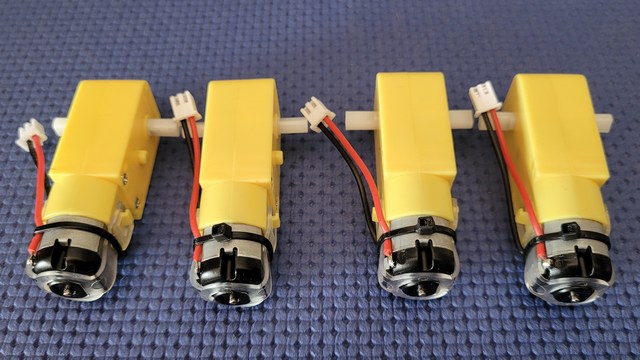
| 4 |  |
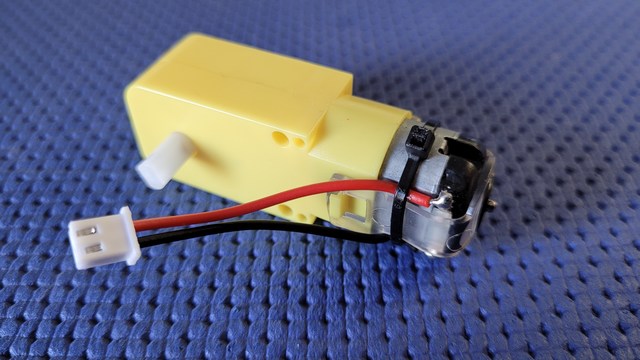
Motoriduttori | 4 | |
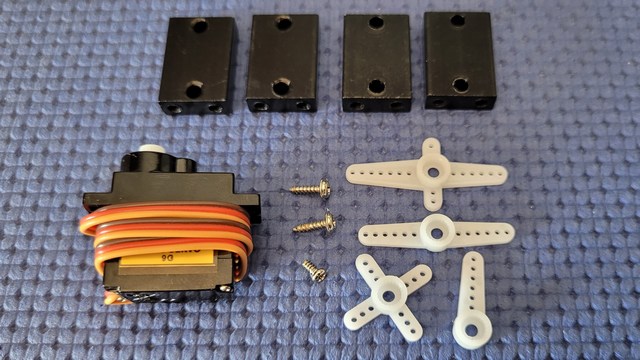
| 5 |  |
Staffe fissaggio motore 23×15 x5 mm | 4 | |
| 6 |  |
Micro Servo 9G | 1 | |
| 7 |  |
Ruote Mecanum (direzione A) | 2 | |
| 8 |  |
Ruote Mecanum (direzione B) | 2 | |
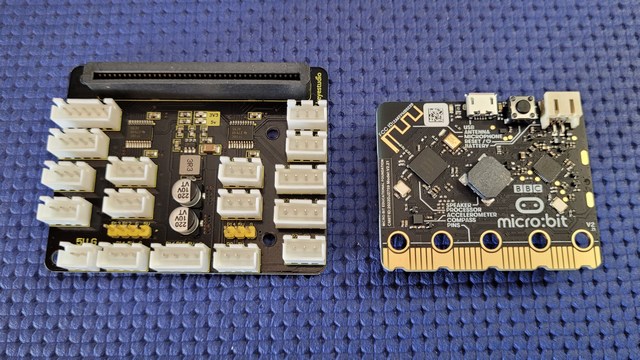
| 9 |  |
Scheda di espansione Micro bit Keyestudio KS4030 | 1 | Vedere pagina WIKI |
| 10 |  |
Scheda madre micro:bit V2.21 | 1 | Vedere articolo BBC micro:bit V2 – Presentazione |
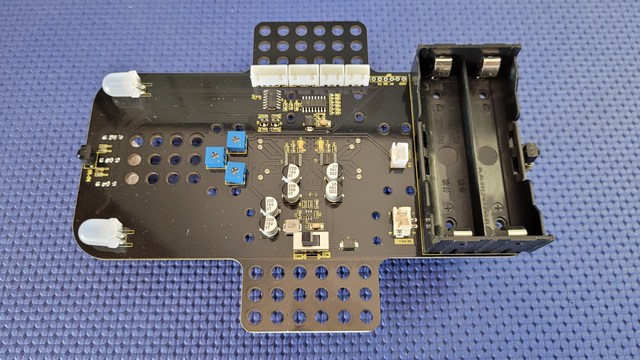
| 11 |  |
Piastra inferiore telaio robot | 1 | |
| 12 |  |
Distanziale ottone a doppio passaggio M3 x 20 mm | 4 | Per fissaggio scheda espansione |
| 13 |  |
Lego Part 4265c | 4 | Per fissaggio staffa unità sonar |
| 14 |  |
Lego Part 43093 | 4 | Per fissaggio staffa unità sonar |
| 15 |  |
Rondella in acrilico | 6 | 2 di scorta Per fissaggio staffa unità sonar |
| 16 |  |
Vite a testa piatta M3 x 6 mm | 10 | Per scheda espansione – 2 di scorta |
| 17 |  |
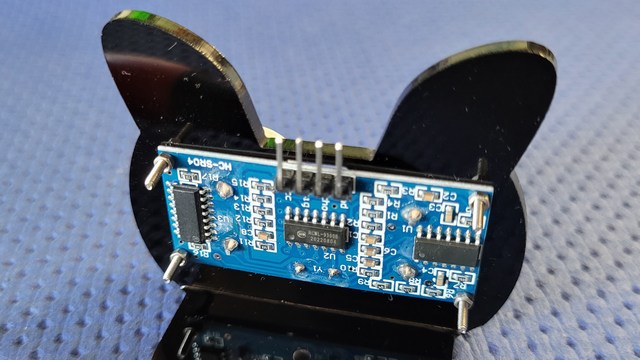
Sensore a ultrasuoni HC-SR04 | 1 | |
| 18 | |
Vite a testa piatta M3 x 8 mm | 10 | Per fissaggio blocchi motore 2 di scorta |
| 19 |  |
Dado nichelato M3 | 10 | Per fissaggio motore (2 di scorta) |
| 20 |  |
Vite a testa tonda M3 x 30 mm | 9 | Per fissaggio motore (1 di scorta) |
| 21 |  |
Dado nichelato M2 | 3 | |
| 22 |  |
Vite a testa tonda M2 x 8 mm | 3 | |
| 23 |  |
Dado nichelato M 1.4 (per sensore ultrasuoni) | 6 | per sensore ultrasuoni – 2 di scorta |
| 24 |  |
Vite a testa tonda M 1.4 x 10 mm | 6 | per sensore ultrasuoni – 2 di scorta |
| 25 |  |
Vite a testa tonda M 2.3 x 16 mm | 4 | |
| 26 |  |
Telecomando | 1 | |
| 27 |  |
Fascette per cablaggi 3×100 mm | 5 | |
| 28 |  |
Cavo USB tipo C | 1 | |
| 29 |  |
Cavo DuPont HX-2.54 2P 100 mm | 1 | Per alimentazione scheda interfaccia |
| 30 |  |
Cavo Dupont XH2.54 5P 100 mm | 1 | |
| 31 |  |
Cavo DuPont HX-2.54 4P 50 mm | 1 | |
| 32 |  |
Cavo DuPont HX2.54 mm-4P a 2.54 F-F DuPont 150 mm | 1 | |
| 33 |  |
Cavo DuPont XH2.54 3P 50 mm | 2 | |
| 34 |  |
Cacciavite 3x 40 mm | 1 | |
| 35 |  |
Giunti per accoppiamento ruote e motore | 4 | |
| 36 |  |
Vite autofilettante a testa tonda M1.2 x 5 mm | 6 | Per fissaggio ruote – 2 di scorta |

Dove trovare il kit
Il Kit può essere acquistato presso Amazon, o AliExpress.
| Acquisto presso Amazon | Acquisto presso AliExpress |
 |
 |
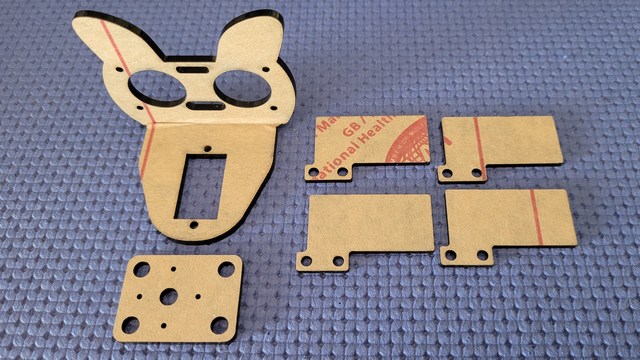
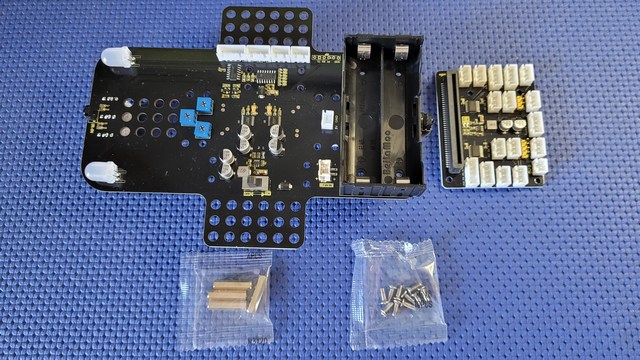
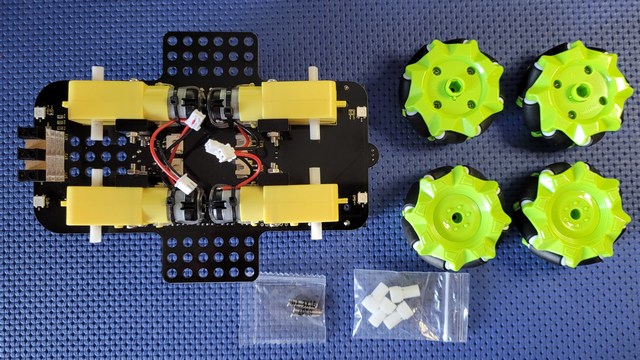
Foto dei componenti che formano il robot





Fasi di montaggio del robot Keyestudio Mecanum Robot
Per il montaggio, nella confezione è presente un apposito cacciavite a croce, oltre a esso è consigliabile l’utilizzo di una piccola pinza a becchi diritti per il serraggio dei dadi presenti.

Pinze a becchi diritti
Vedere per esempio la Pinza universale pesante 160 mm in vendita presso il sito di Futura Elettronica al costo di 5,80 €, Codice Prodotto 8240-TPHP01
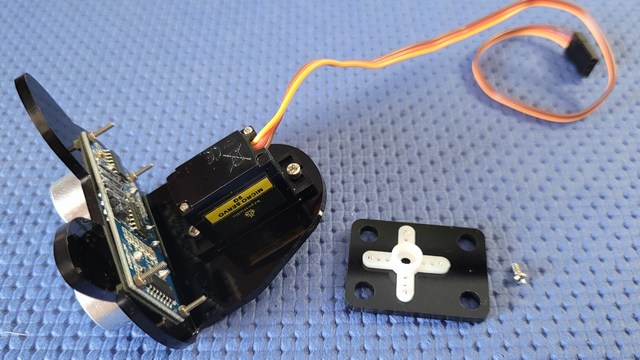
Montaggio del sensore sonar



Montaggio del servomotore sensore sonar




Assemblaggio staffa supporto sensore sonar




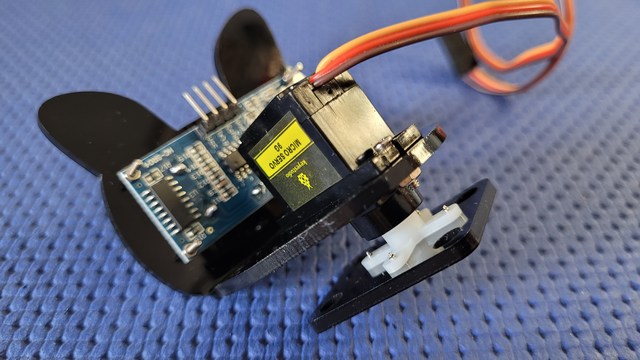
Fissaggio staffa su gruppo sonar
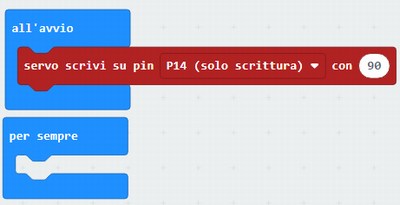
Prima di fissare il servo è necessario regolare l’angolo del servo a 90 °gradi, per fare questo occorre collegare momentaneamente il servomotore al connettore presente sulla scheda Expansion Board ed eseguire il programma sottostante realizzato tramite il Miscosoft makerCode for Microbit
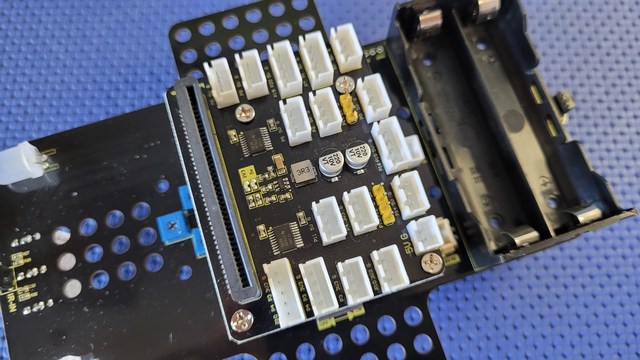
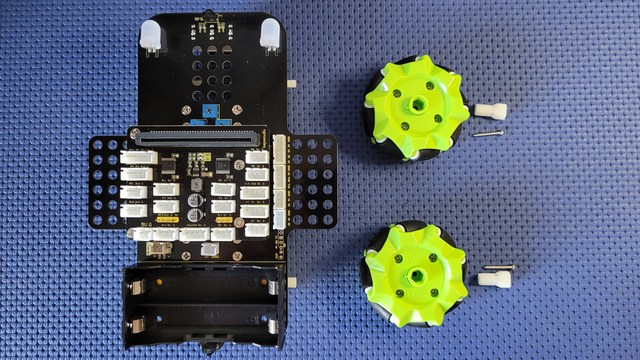
Fissaggio del KS4030 Keyestudio Micro:bit IO Port Expansion

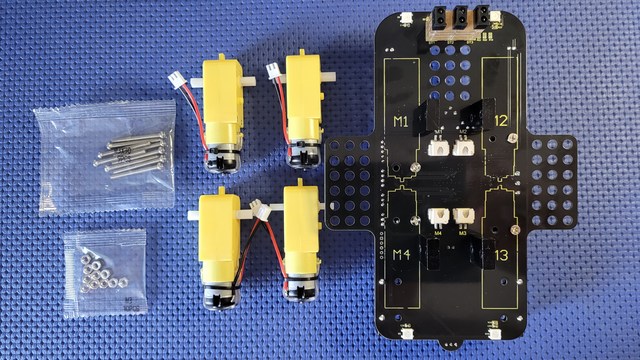
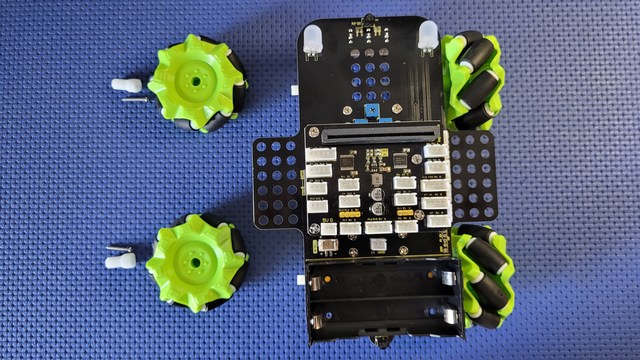
Montaggio dei motoriduttori

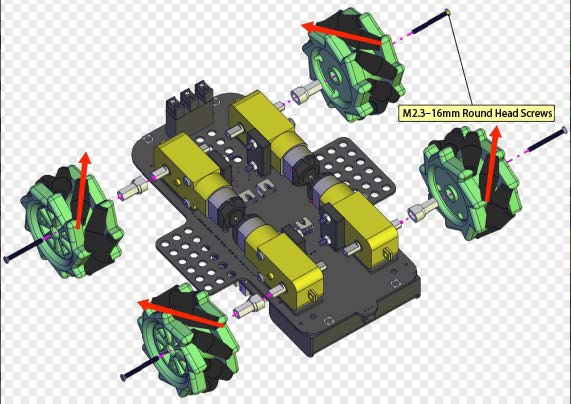
Montaggio delle Ruote Mecanum
Prestare attenzione alla direzione di installazione della ruota Mecanum. Ecco lo schema.

Posizionamento del sensore sonar


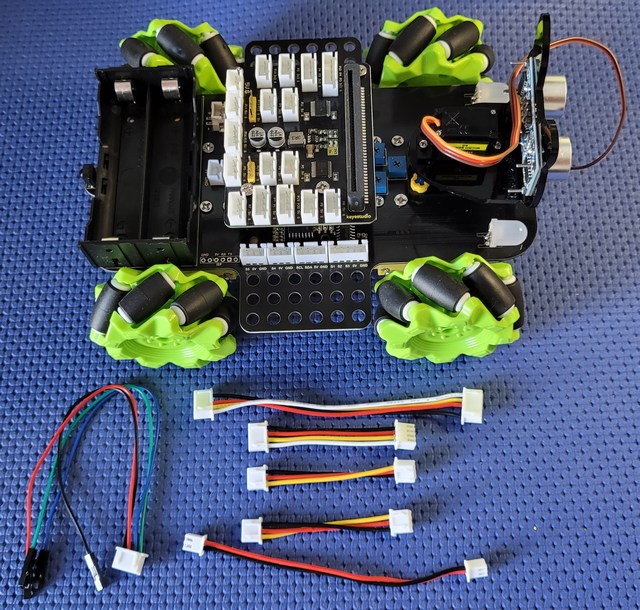
Collegamento dei cavi
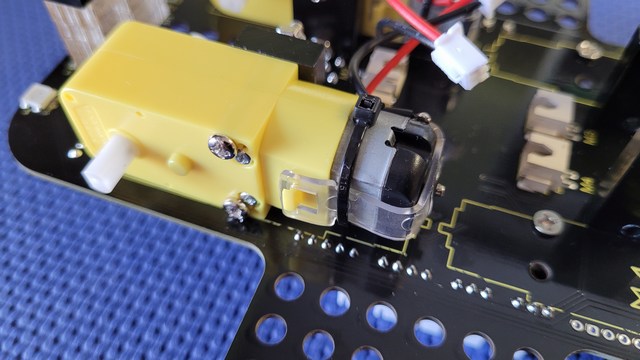
Cablaggio del servo

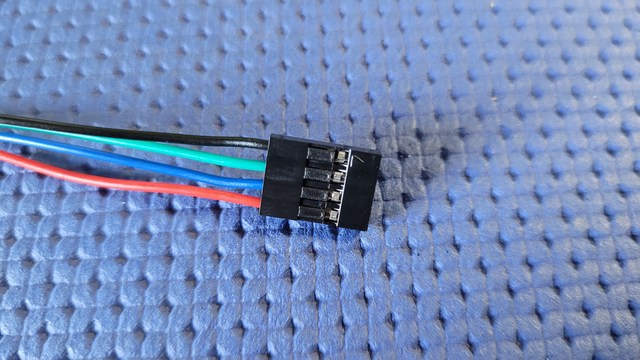
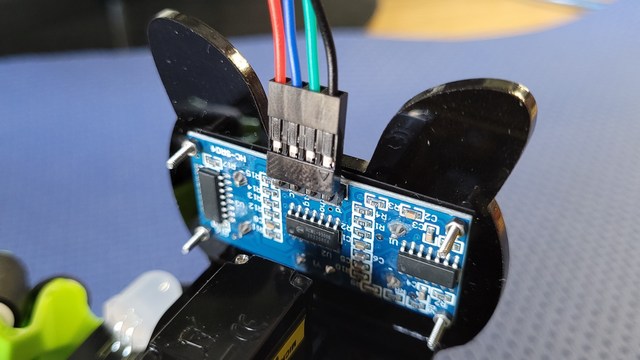
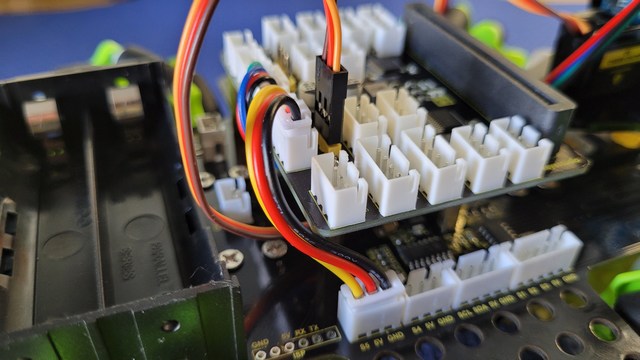
Il cablaggio del sensore a ultrasuoni
Prima di procedere al collegamento del sensore a ultrasuoni si è proceduto alla sostituzione di 4 connettori singoli con un connettore a 4 posizioni.
NOTA: questa modifica con è strettamente necessaria, ma serve solamente a evitare eventuali errori di collegamento.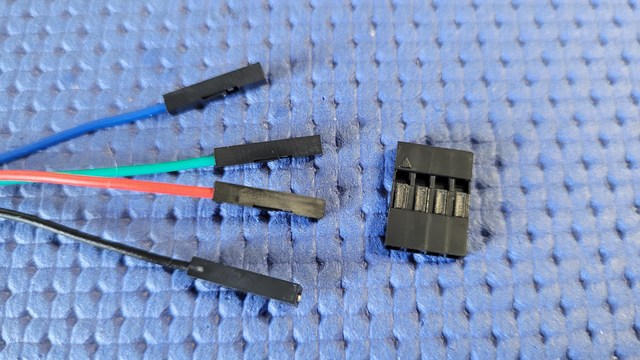
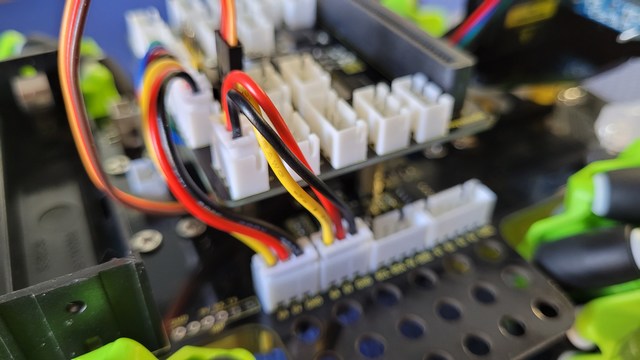
Collegamento del modulo ricevitore IR
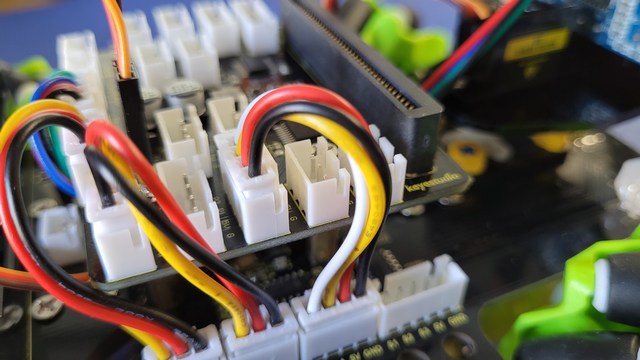
Cablaggio dei led RGB
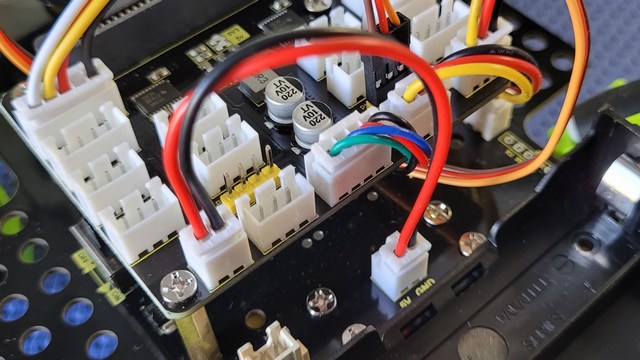
Cablaggio di controllo del motore e della luce a sette colori
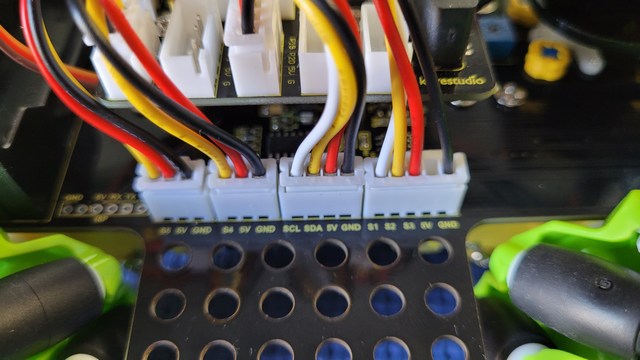
Il cablaggio per il controllo del sensore di tracciamento linea a 3 canali
![]()
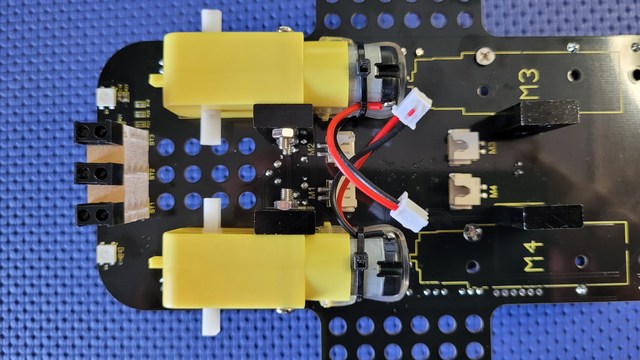
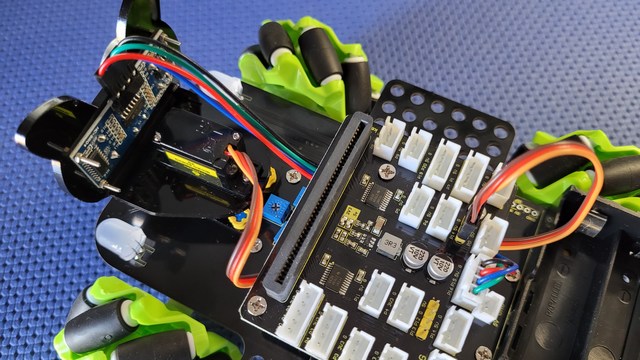
Il cablaggio dell’alimentatore /batterie
L’interfaccia corrispondente del motore
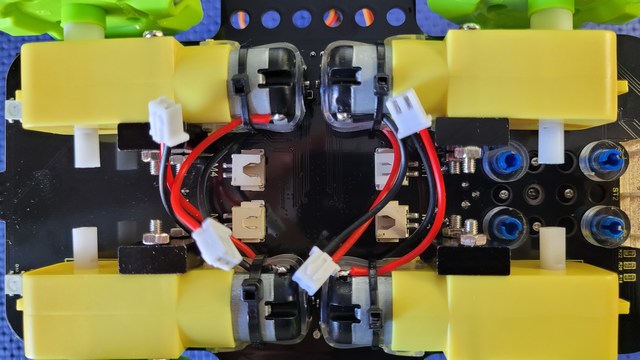
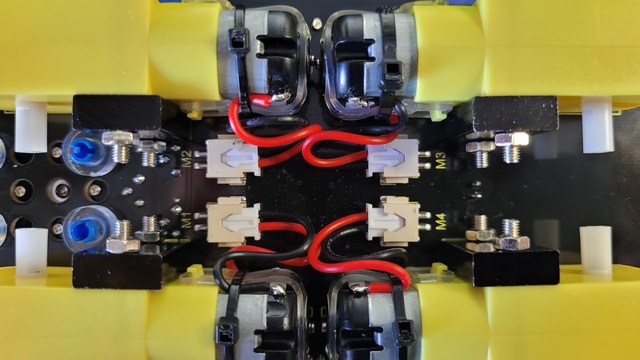
Tabella riassunto collegamenti
| Dispositivo | Cavo/Driver Board | Expansion Board |
| Servo | Brown | G |
| Red | V | |
| Yellow | P14 | |
| Sensore Ultrasonico | VCC | 5V |
| TRIG | P15 | |
| ECHO | P16 | |
| GND | G | |
| Modulo ricevitore IR | GND | G |
| 5V | 5V | |
| S5 | P0 | |
| LED RGB | GND | G |
| 5V | 5V | |
| S4 | P7 | |
| Controllo motori e luce a sette colori | SCL | P19 |
| SDA | P20 | |
| 5V | 5V | |
| GND | G | |
| Sensore di tracciamento linea a 3 canali | S1 | P10 |
| S2 | P4 | |
| S3 | P3 | |
| GND | G |
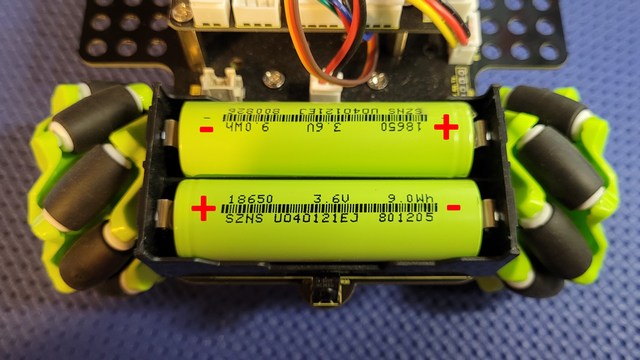
Installazione batterie
Il 4WD Mecanum Robot Car è alimentato da due batterie 18650. Il portabatteria è compatibile con qualsiasi tipo di batteria al litio 18650 (ricaricabile). Per la ricarica occorre utilizzare un caricabatterie universale per caricare la batteria al litio 18650. Nel KIT non è presente ne il caricabatteria ne le due batterie necessarie che saranno da acquistare.
Nel modello testato sono state utilizzate due batterie da 3,6V – 9.0 Wh (2500 mA/h)
Posizionamento Scheda controllo micro:bit V2.21
Per informazioni sulla scheda di controllo BBC micro:bit vedere articolo BBC micro:bit V2 – Presentazione
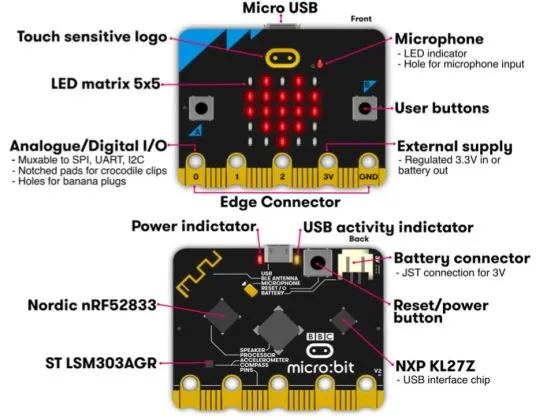
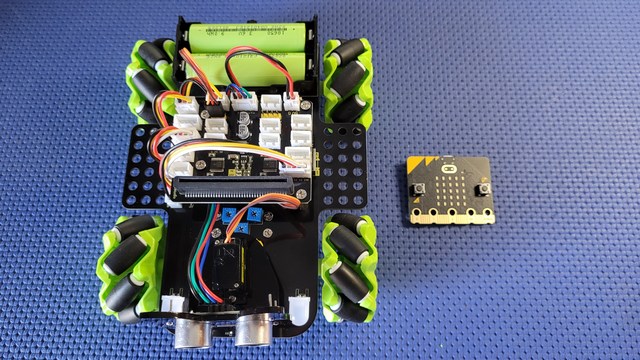
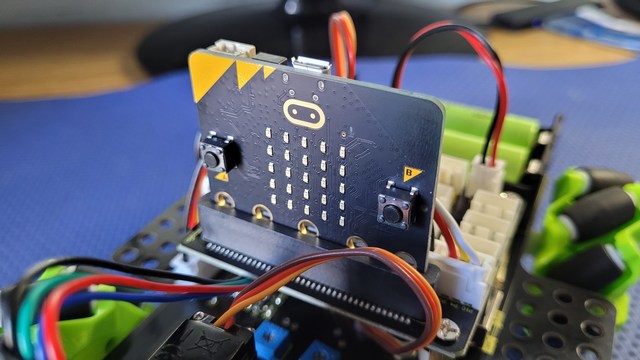
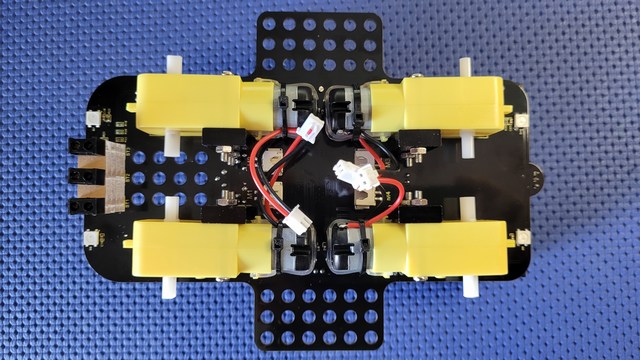
Foto montaggio completato
Sotto la foto del robot completamente montato.
