

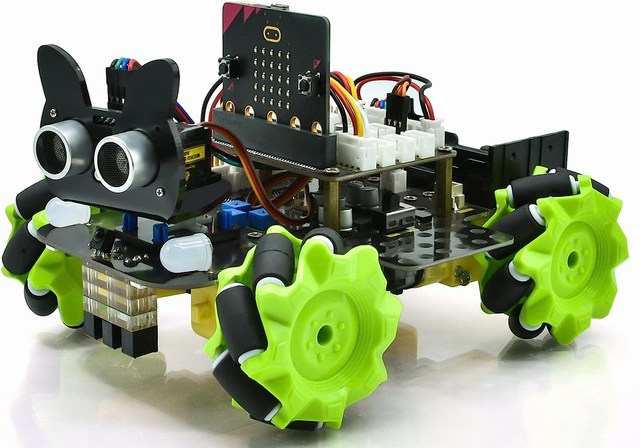
Il robot 4WD Mecanum Robot della Keyestudio codice KS4034 , si basa sulla scheda Micro:bit connessa ad una scheda di estensione e conversione di livello per le porte I/O. Sulla scheda telaio sono poi presenti: due driver per i 4 motori con relativi connettori, 4 LED WS2812B RGB, 2 ricevitori IR, 2 LED Rainbow, l’interruttore di alimentazione, il circuito per i tre sensori di tracciamento e il portabatterie. E’ poi presente un Sensore a ultrasuoni HC-SR04 azionato da un mini servomotore.

Indice
Descrizione del robot
Questo Robot 4WD con ruote tipo Mecanum è di tipo intelligente, basato sulla scheda di controllo micro:bit. E’ composto da una carrozzeria con funzioni estese, una piastra di base PCB con sensori, driver di azionamento del motore integrati, 4 motoriduttori in CC, ruote Mecanum, vari moduli e sensori e parti realizzate con pannelli acrilici.
Abbastanza facile da assemblare, con una piattaforma di programmazione di tipo grafico online di Microsoft Make Code per programmare la scheda di controllo micro: bit.
Si potrà così sperimentare il divertimento della creazione e migliorare anche le abilità pratiche. Si potranno anche apprendere nuove abilità di programmazione.
MakeCode per micro:bit è l’ambiente di programmazione grafica più utilizzato sul sito ufficiale di micro:bit. Si basa sull’ambiente di programmazione grafica sviluppato dal progetto open source di Microsoft.
Questa programmazione grafica può anche essere convertita in linguaggi di codice, python e linguaggio java script, rendendo più accessibile l’apprendimento della programmazione.
Allo stesso tempo, la programmazione Makecode può essere simulata o programmata per componenti elettronici reali.
| Descrizione | Valore |
|---|---|
| Tensione ingresso porta connettore: | DC 6V-9V |
| Alimentazione batterie: | 2 x 18630 3,6V (7,2V) |
| Tensione operativa del sistema della scheda driver: | 5V |
| Tensione di lavoro scheda micro: bit | 3,3 V |
| Consumo energetico operativo standard: | circa 2,2 W |
| Potenza massima assorbita | 2W |
| Velocità del motore | 200 RPM |
| Intervallo di temperatura di lavoro | 0-50℃ |
| Dimensioni robot: | 140x175x115 mm |
| Peso con batterie | 550 g |


Dove trovare il kit
Il Kit può essere acquistato presso Amazon, o AliExpress.
| Acquisto presso Amazon | Acquisto presso AliExpress |
 |
 |

Componenti presenti nel KIT

| n° | Immagine | Descrizione | Q.tà | Note |
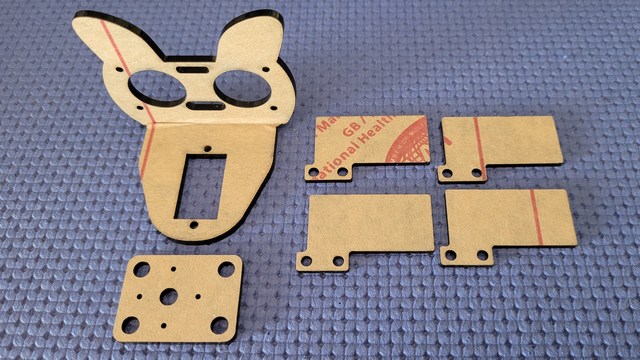
| 1 |  |
Pannello acrilico T=3mm | 1 | Per fissaggio sonar |
| 2 |  |
Pannello acrilica con fori Lego T=3mm | 1 | Per fissaggio staffa unità sonar |
| 3 | 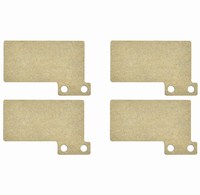 |
Distanziali per motore | 4 | |
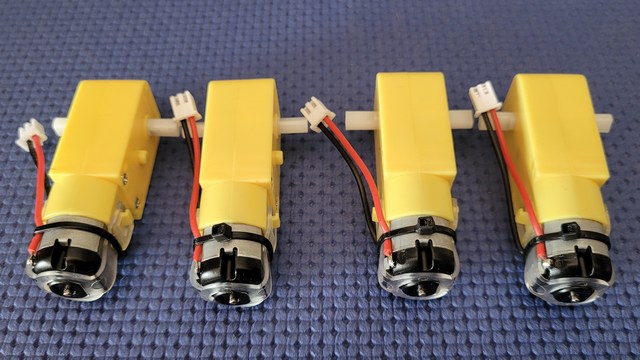
| 4 |  |
Motoriduttori | 4 | |
| 5 |  |
Staffe fissaggio motore 23×15 x5 mm | 4 | |
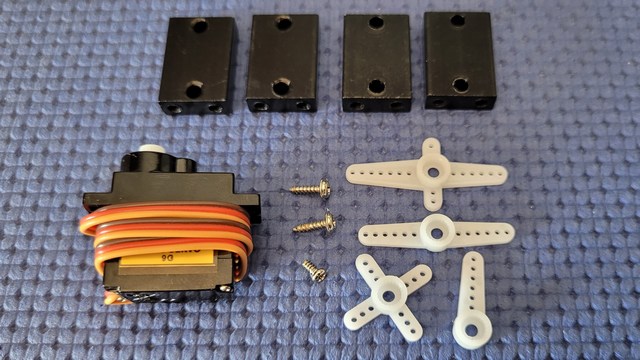
| 6 |  |
Micro Servo 9G | 1 | |
| 7 |  |
Ruote Mecanum (direzione A) | 2 | |
| 8 |  |
Ruote Mecanum (direzione B) | 2 | |
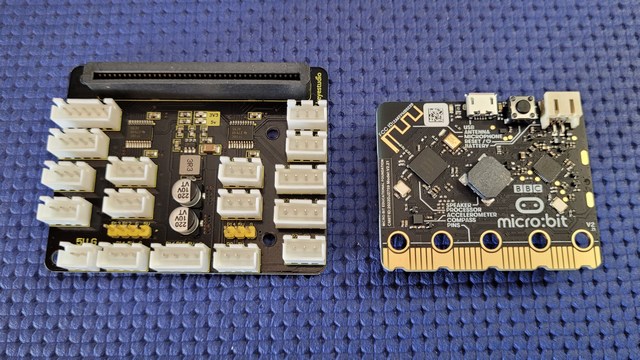
| 9 |  |
Scheda di espansione Micro bit Keyestudio KS4030 | 1 | Vedere pagina WIKI |
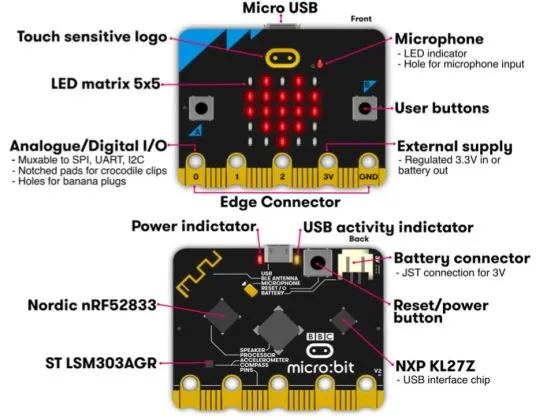
| 10 |  |
Scheda madre micro:bit V2.21 | 1 | |
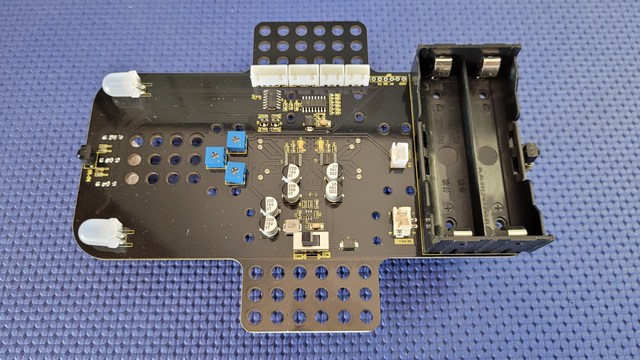
| 11 | 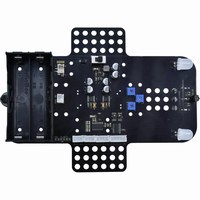 |
Piastra inferiore telaio robot | 1 | |
| 12 |  |
Distanziale ottone a doppio passaggio M3 x 20 mm | 4 | Per fissaggio scheda espansione |
| 13 |  |
Lego Part 4265c | 4 | Per fissaggio staffa unità sonar |
| 14 |  |
Lego Part 43093 | 4 | Per fissaggio staffa unità sonar |
| 15 |  |
Rondella in acrilico | 6 | 2 di scorta Per fissaggio staffa unità sonar |
| 16 |  |
Vite a testa piatta M3 x 6 mm | 10 | Per scheda espansione – 2 di scorta |
| 17 |  |
Sensore a ultrasuoni HC-SR04 | 1 | |
| 18 | |
Vite a testa piatta M3 x 8 mm | 10 | Per fissaggio blocchi motore 2 di scorta |
| 19 |  |
Dado nichelato M3 | 10 | Per fissaggio motore (2 di scorta) |
| 20 |  |
Vite a testa tonda M3 x 30 mm | 9 | Per fissaggio motore (1 di scorta) |
| 21 |  |
Dado nichelato M2 | 3 | |
| 22 |  |
Vite a testa tonda M2 x 8 mm | 3 | |
| 23 |  |
Dado nichelato M 1.4 (per sensore ultrasuoni) | 6 | per sensore ultrasuoni – 2 di scorta |
| 24 |  |
Vite a testa tonda M 1.4 x 10 mm | 6 | per sensore ultrasuoni – 2 di scorta |
| 25 |  |
Vite a testa tonda M 2.3 x 16 mm | 4 | |
| 26 |  |
Telecomando | 1 | |
| 27 |  |
Fascette per cablaggi 3×100 mm | 5 | |
| 28 |  |
Cavo USB tipo C | 1 | |
| 29 |  |
Cavo DuPont HX-2.54 2P 100 mm | 1 | Per alimentazione scheda interfaccia |
| 30 |  |
Cavo Dupont XH2.54 5P 100 mm | 1 | |
| 31 |  |
Cavo DuPont HX-2.54 4P 50 mm | 1 | |
| 32 |  |
Cavo DuPont HX2.54 mm-4P a 2.54 F-F DuPont 150 mm | 1 | |
| 33 |  |
Cavo DuPont XH2.54 3P 50 mm | 2 | |
| 34 |  |
Cacciavite 3x 40 mm | 1 | |
| 35 |  |
Giunti per accoppiamento ruote e motore | 4 | |
| 36 |  |
Vite autofilettante a testa tonda M1.2 x 5 mm | 6 | Per fissaggio ruote – 2 di scorta |





Video dell’unboxing
Montaggio del robot
Per le operazioni di montaggio del robot vedere lo specifico articolo KS4034 Robot 4WD con Micro:bit della Keyestudio – Montaggio

Caratteristiche dei principali componenti
Di seguito la tabella che mostra i principali componenti presenti nel Keyestudio 4WD Mecanum Robot
| Descrizione | Foto |
| Motore CC: 4 motoriduttori Tensione di funzionamento: 3 ~ 6V; Min. Velocità operativa (6 V): 200 +/- 10% RPM | 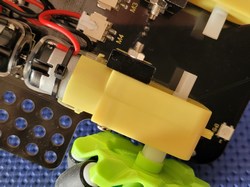 |
| Servomotore: tipo 9G: utilizzato per muovere il sensore sonar. Coppia: 1.6 kg/cm, Velocità di reazione: 0.1sec/60 gradi, Tensione di lavoro: 4.8V |  |
| Sensore ultrasonico: tipo HC-SR04: Tensione di alimentazione 5V, Frequenza ultrasuoni 40 kHz, Distanza massima di lettura 400 cm, Distanza minima 2 cm. |  |
| Sensore per segui linea formato da 3 sensori ST188 Contiene un diodo emettitore IR e fototransistor ricevente IR. Quando i segnali a infrarossi emessi dal diodo emittente vengono ricevuti dal fototransistor ricevente attraverso la riflessione, vi sarà una variazione di tensione sul circuito. Questi sono poi gestiti dal circuito di controllo. | 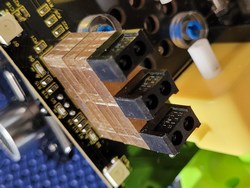 |
| Ricevitore IR HS388D – uno anteriore e uno posteriore al robot. E’ un ricevitore IR dotato di un filtro ottico che non permette il passaggio della luce eccetto che a quella di 980 nm di lunghezza d’onda al suo sensore a fotodiodo interno. Il rivelatore infrarosso ha anche un filtro elettronico che permette il passaggio solamente a segnali con una frequenza di 38 kHz |
 Keyestudio 4WD Mecanum Robot |
| LED RGB WS2812 – è un led RGB a controllo digitale; utilizza un RGB SMD 5050, al cui interno è stato installato un minuscolo chip. In questo chip è presente un regolatore di luminosità a corrente costante che assicura un colore uniforme anche con differenti tensioni di alimentazione e un’interfaccia di comando seriale a una sola linea. | 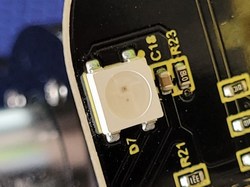 |
| Led a sette colori – Questo modulo sembra un normale LED (∅10mm) di colore bianco ma che può emettere 7 colori. Può lampeggiare automaticamente in diversi colori per creare effetti di luce quando viene attivato. |  |
Ambiente di programmazione
La programmazione del robot può essere fatta tramite le tre modalità possibili date dalla scheda Micro:bit
Microsoft MakeCode: L’editor MakeCode di Microsoft è il modo perfetto per iniziare a programmare e creare con BBC micro: bit. I blocchi colorati sono familiari a chiunque abbia già utilizzato Scratch, eppure abbastanza potenti da accedere a tutte le funzionalità di questo minuscolo computer. Si può anche passare a JavaScript per vedere il codice testuale dietro i blocchi.

PYTHON: è stato ed è tuttora in sviluppo per permettere la programmazione dei microcontrollori in un linguaggio compatibile con Python. L’opportunità di utilizzare il linguaggio Python permette poi di dare continuità, in un ipotetico percorso didattico, verso l’utilizzo di sistemi più complessi come i microcomputer in grado di ospitare GNU/Linux, come la serie Raspberry Pi.

JAVASCRIPT: è un ambiente di sviluppo che permette a chi ha fatto progressi nella programmazione, di sviluppare programmi utilizzando la sintassi testuale di Javascript, con un editor guidato che supporta il metodo “clicca e trascina”, per la composizione delle righe e dei blocchi di codice.
Nella documentazione fornita sono presenti circa 20 progetti che puoi programmare per il funzionamento dell’auto robot: alpinismo, evitare ostacoli, sequenze ultrasoniche, luce a colori RGB, telecomando IR e controllo APP wireless.
| N° | Nome progetto | Dispositivo su | Descrizione |
|---|---|---|---|
| 1 | Heartbeat | Micro:bit | Simula battito cardiaco sul display della scheda |
| 2 | Light A Single LED | Micro:bit | Accendi un singolo LED |
| 3 | LED Dot Matrix-1 | Micro:bit | Utilizzo della matrice di led (2 esempi) |
| 4 | Programmable Buttons | Micro:bit | Esempio utilizzo pulsanti programmabili (2 esempi) |
| 5 | Temperature Measurement | Micro:bit | Misurazione della temperatura (2 esempi) |
| 6 | Geomagnetic Sensor | Micro:bit | Utilizzo sensore geomagnetico tipo MAG3110 triassiale (2 esempi) |
| 7 | Accelerometer | Micro:bit | Utilizzo accelerometro tipo MMA8653FC triassiale (2 esempi) |
| 8 | Light Detection | Micro:bit | Utilizzo sensore di luce |
| 9 | Speaker | Micro:bit | Utilizzo buzzer |
| 10 | Touch-sensitive Logo | Micro:bit | Utilizzo Logo sensibile al tocco |
| 11 | Microphone | Micro:bit | Utilizzo microfono (2 esempi) |
| 12 | Bluetooth Wireless Communication | Micro:bit | Comunicazione senza fili tramite Bluetooth |
| 13 | Colorful Lights | Robot | Gestione Luci colorate (2 esempi) |
| 14 | WS2812 RGB LEDs | Robot | Gestione LED RGB WS2812 (3 esempi) |
| 15 | Servo | Robot | Gestione Servo |
| 16 | Motor | Robot | Gestione motori (2 esempi) |
| 17.1 | Detect Line Tracking Sensor | Robot | Utilizzo dei sensori di tracciamento della linea |
| 17.2 | Line Tracking Smart Car | Robot | Programma movimento autonomo con tracciamento della linea |
| 18.1 | Ultrasonic Ranging | Robot | Utilizzo sensore ultrasonico |
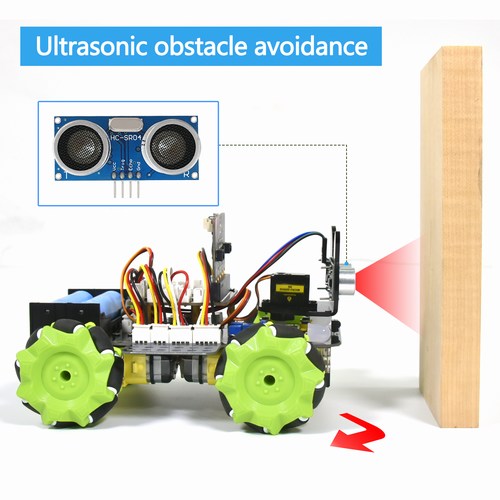
| 18.2 | Ultrasonic Avoidance Car | Robot | Programma movimento autonomo per evitare gli oggetti tramite sensore ultrasonico |
| 18.3 | Ultrasonic Follow Smart Car | Robot | Programma movimento autonomo la macchina segue un oggetto tramite sensore ultrasonico |
| 19.1 | Decode IR Remote Control | Robot | Esempio decodifica tasto da telecomando IR |
| 19.2 | IR Remote Control Car | Robot | Programma per telecomando del robot tramite telecomando IR |
| 20.1 | Read Bluetooth Data | Robot | Utilizzo Bluetooth |
| 20.2 | Multi purpose Smart Car | Robot | Programma per telecomando del robot tramite APP connessa tramite Bluetooth |
Possibilità gestione del robot
Tramite la programmazione della scheda Micro:bit è possibile far eseguire varie funzioni. Questi utilizzano i vari sensori disponibili.
Utilizzo del sensore sonar
Due modalità utilizzano il sensore sonar. In un caso potremmo farci seguire dal robot, Ultrasonic following, oppure il robot eviterà gli oggetti Ultrasonic obtacle avoidance.

Utilizzo dei sensori segui linea
Mediante l’utilizzo dei tre sensori frontali il robot è in grado di distinguere la linea nera (che riflette poco) dal piano su cui è disegnato il tracciato (che riflette il raggio infrarosso). I motori vengono comandati considerando a seconda di quanti e quali sensori rilevano la linea nera.
![]()
Comando del robot tramite telecomando a infrarossi
In questo caso il movimento del robot è comandato tramite il telecomando IR fornito e decodificato dai due sensori presenti. i movimento sono dati dalle quattro frecce direzionali presenti sul telecomando.

Telecomando del robot tramite APP
Per ultimo il comando Keyestudio 4WD Mecanum Robot può essere eseguito tramite una APP scaricabile dalla rete. Il collegamento è tramite il Bluetooth presente sulla scheda micro:bit

Alimentazione e batteria
Il Keyestudio 4WD Mecanum Robot Car è alimentato da due batterie 18650. Il portabatteria è compatibile con qualsiasi tipo di batteria al litio 18650 (ricaricabile). Il caricabatteria non è compreso o presente, è possibile utilizzare un caricabatterie universale per caricare la batteria al litio 18650.
Altro kit dedicato alla scheda Micro:bit
Per chi fosse ad approfondire la conoscenza della scheda Micro:bit consiglio il Keyestudio 37 in 1 Starter Kit per BBC micro:bit che offre una piattaforma di prototipazione elettronica open-source basata su hardware (sensori e componenti) di facile utilizzo tramite software.
Progettato per evolvere con il livello dell’utente, dal livello principiante al livello professionale.

Il Keyestudio 37-in-1 Starter Kit for BBC micro:bit contiene una selezione dei sensori più comunemente usati e più utili in elettronica. Per il kit è disponibile online un tutorial con svariati progetti creativi per apprendere le basi dell’elettronica e programmare le schede BBC Micro bit V1 o V2.
Vedere articolo Keyestudio 37 in 1 Starter Kit per BBC micro:bit
Prossimamente
Nei prossimi articoli analizzeremo in dettaglio i componenti e le schede elettroniche presenti sul robot.
