

In questo articolo e in altri presenti sul sito vedremo il progetto completo per la costruzione di un robot cingolato: Little BOT. Si tratta di un piccolo robot dotato di una scheda di controllo su cui è installato un Arduino Nano. Il telaio è realizzato in alluminio ed è mosso da due moto riduttori realizzati completamente in metallo che muovono una coppia di cingoli.
Altri progetti di robot si possono trovare nell’articolo Progetti completi di robot autocostruiti da adrirobot

Indice
Descrizione
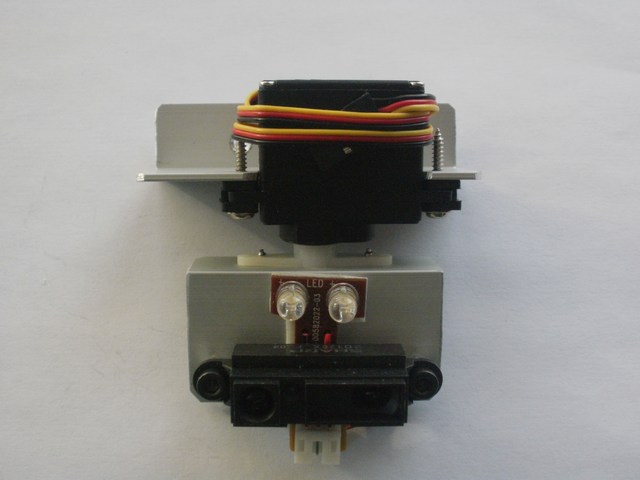
Il robot Little BOT è dotato di sensori che gli permettono di rilevare alcuni parametri tra i quali la luminosità e la temperatura. Un sensore frontale azionato da un servomotore permette al robot di scandagliare lo spazio frontale e misurare la distanza da eventuali ostacoli e in questo modo di evitarli.
La presenza di un modulo Bluetooth permette di pilotare il robot in modo wireless.
In una prima versione questo veniva fatto con una scheda Arduino Esplora, attualmente il robot può essere controllato tramite smartphone con una semplice App.
Altri articoli relativi al robot:
- LittleBOT – Scheda controllo robot
- LittleBOT – Fasi di montaggio del telaio robot
- LittleBOT – Stazione di controllo del robot
- LittleBOT – App per il controllo robot

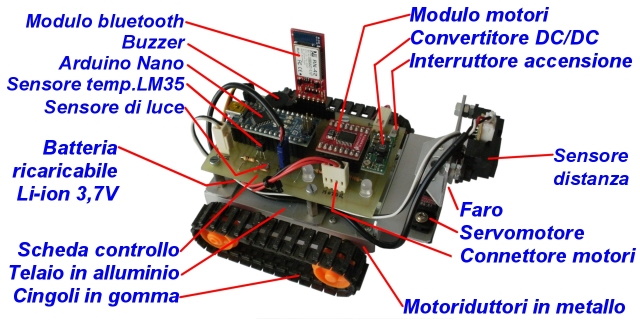
Posizione dei componenti

Caratteristiche
| Processore di comando | Arduino Nano |
| Modulo comando motori | Motor Driver 1A Dual TB6612FNG |
| Segnalazione verso rotazione con led bicolore | |
| Motoriduttori | 30:1 Micro Metal Gearmotor HP |
| Cingoli Tamiya codice originale 70100 | |
| Uscite | Comando servo |
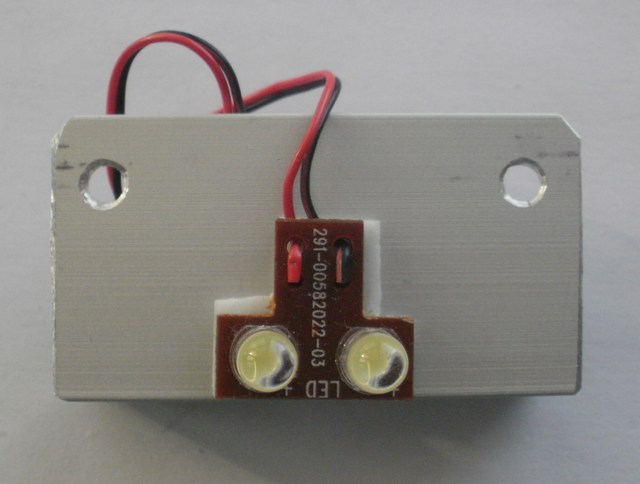
| Comando faro a led per illuminazione | |
| Uscita audio | Buzzer |
| Sensori | Temperatura LM35 |
| Luce Fotoresistenza | |
| Distanza IR GP2D120 | |
| Trasmissione telemetria | Modulo HC-05 |
| Convertitore DC/DC | Pololu Adjustable Boost Regulator 2.5-9.5V |
| Alimentazione | Batteria Li-ion 3,7V 1840mA/h |
| Controllo livello tensione tramite processore | |
| Misure | 130x103x82 mm |
| Peso | 250 g |

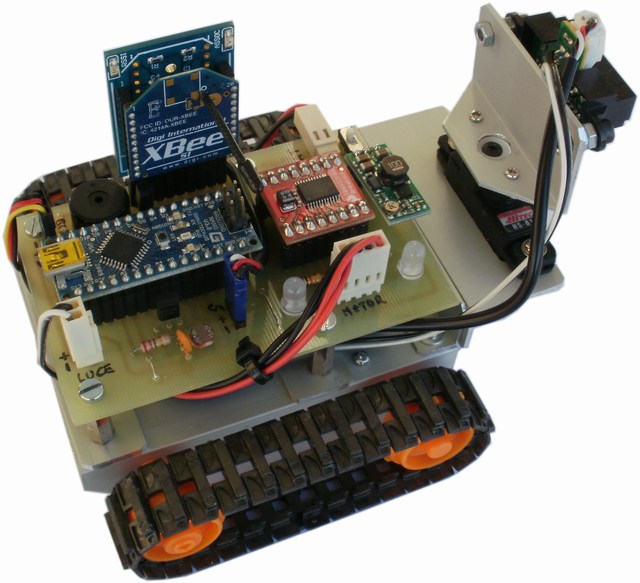
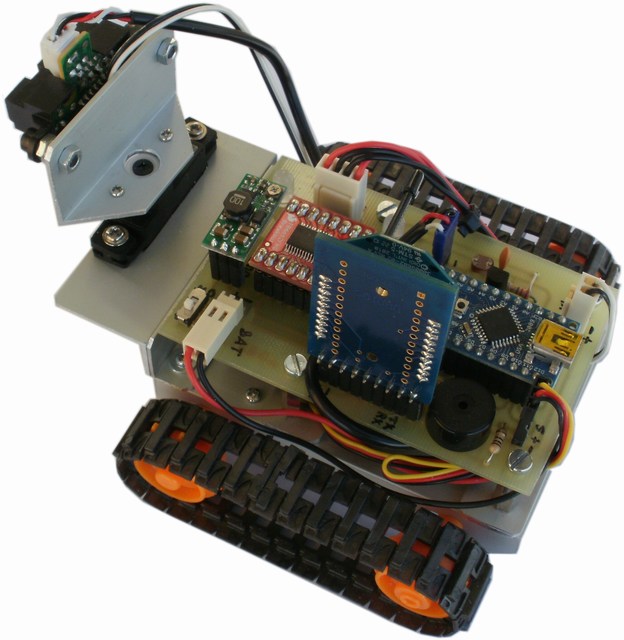
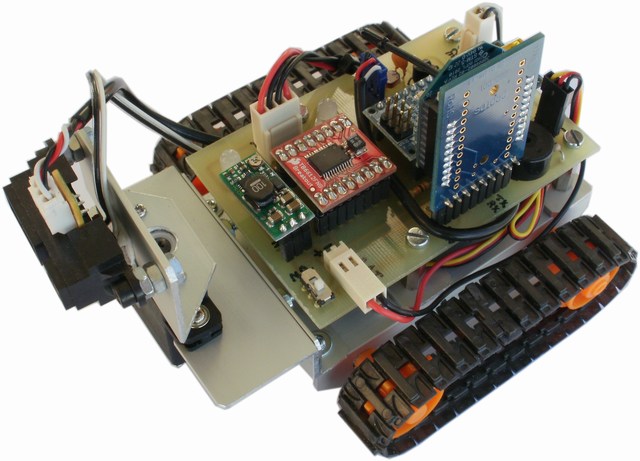
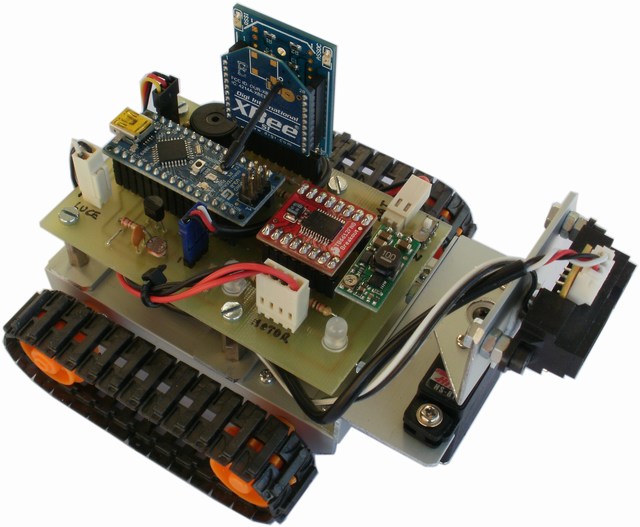
Disegno complessivo del Robot
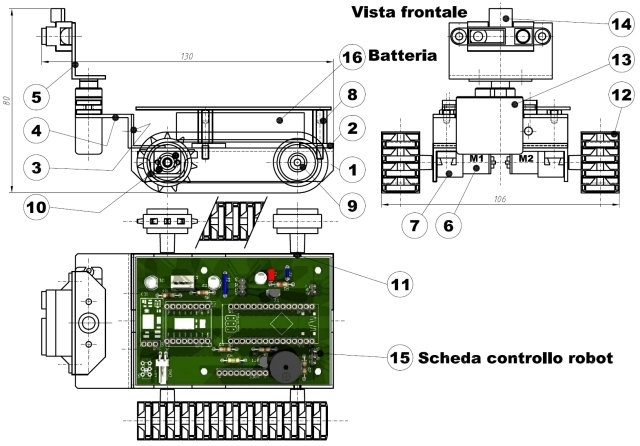
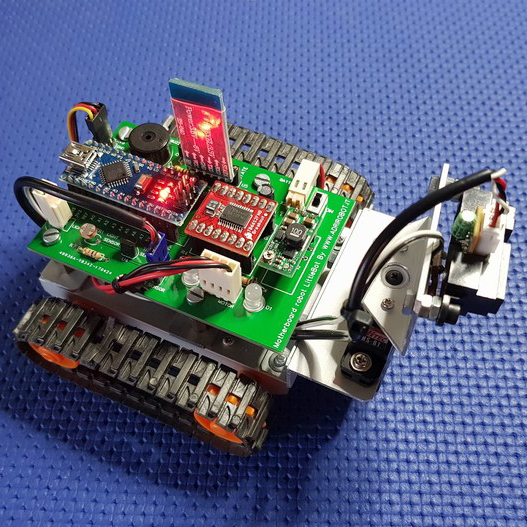
Foto del primo prototipo
Filmati
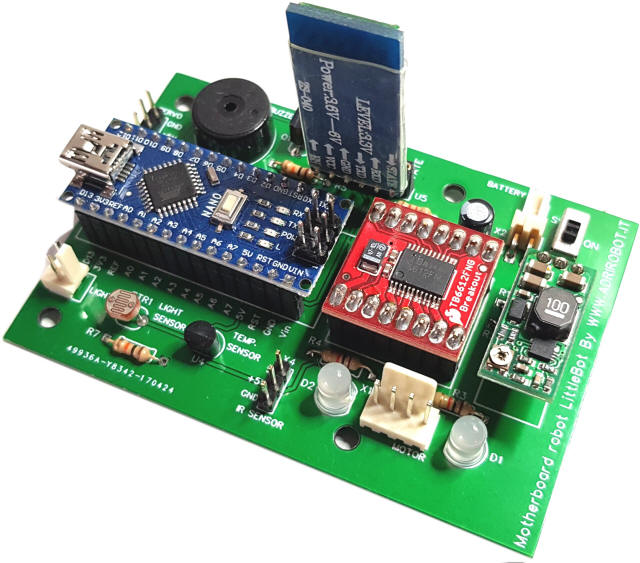
Scheda di controllo
Il robot Little BOT dispone di una propria scheda di controllo. Le dimensioni sono 86 x 58 mm, su di essa trovano posto i componenti principali o i connettori di collegamento.
-
Alimentazione con batteria Li-PO e modulo elevatore di tensione DC-DC;
-
Controllo motori con Motor Driver 1A Dual TB6612FNG;
-
Fotocellula come sensore di luce:
-
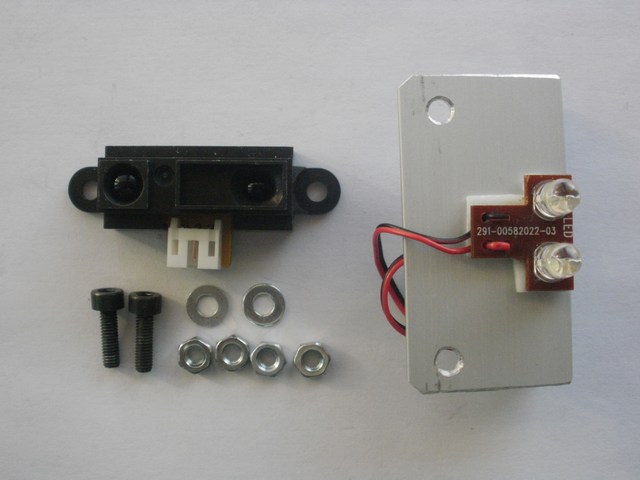
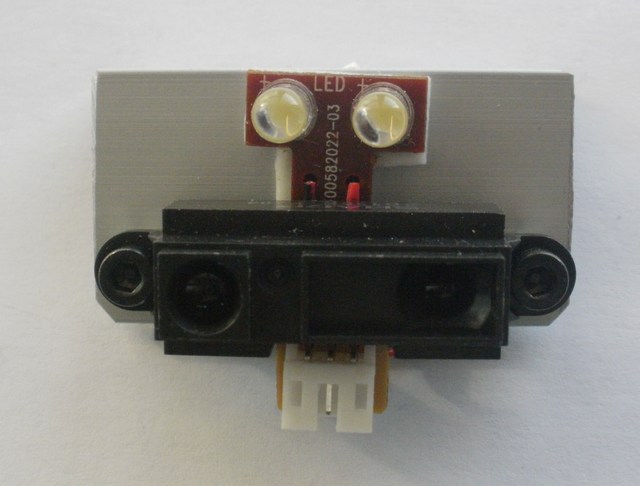
IR GP2D120 come sensore di distanza;
-
LM35 come sensore di temperatura;
- Connettore per faro illuminazione
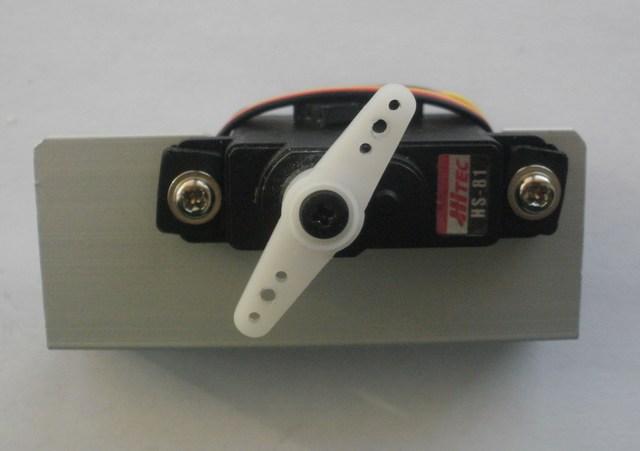
- Connettore servo tipo Hitec HS81.
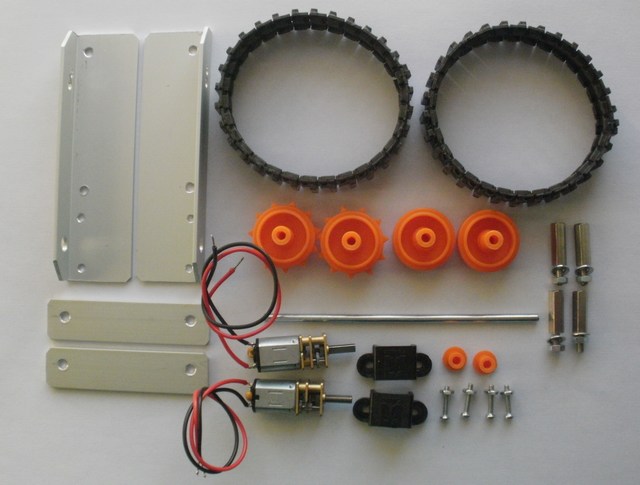
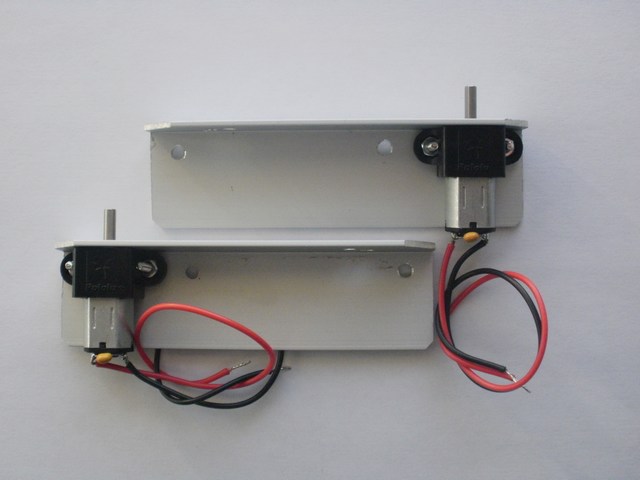
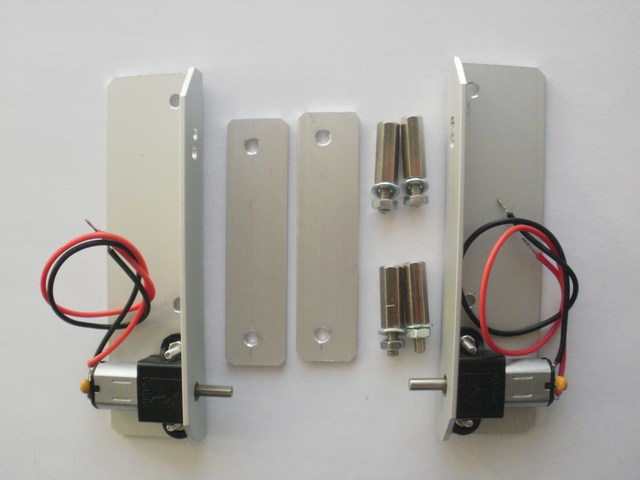
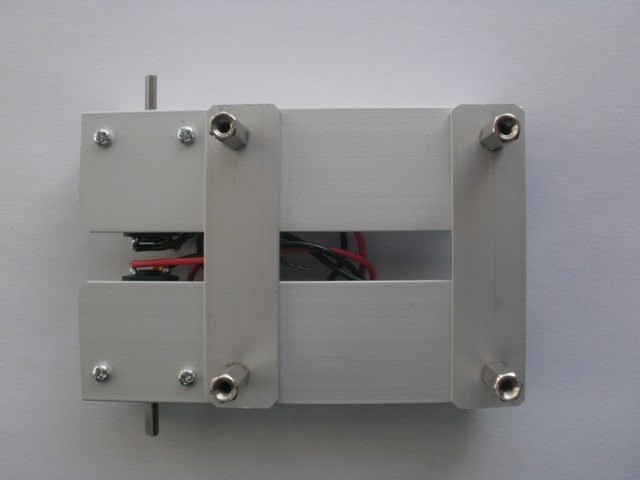
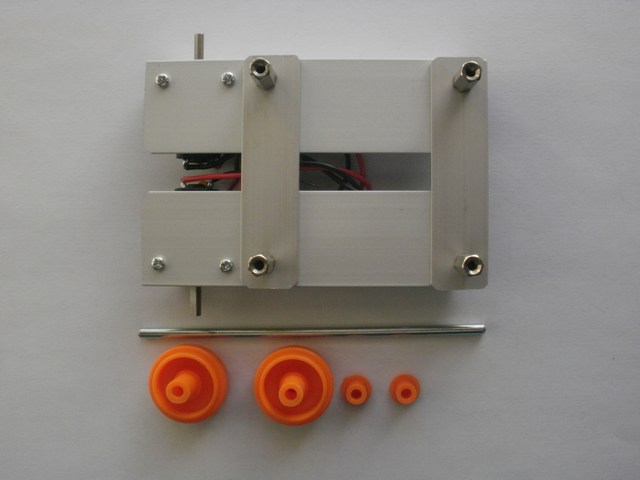
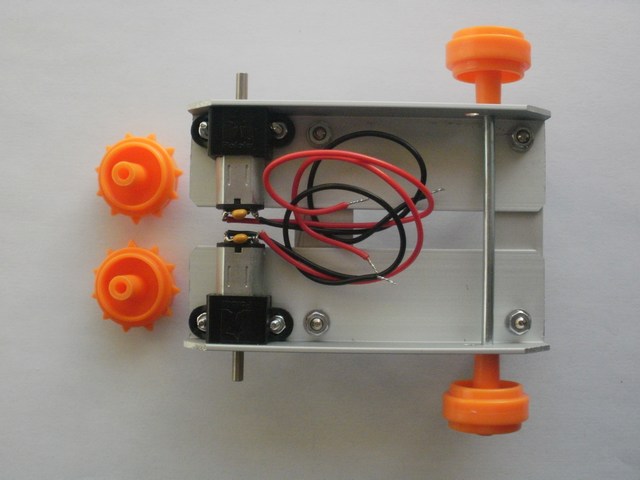
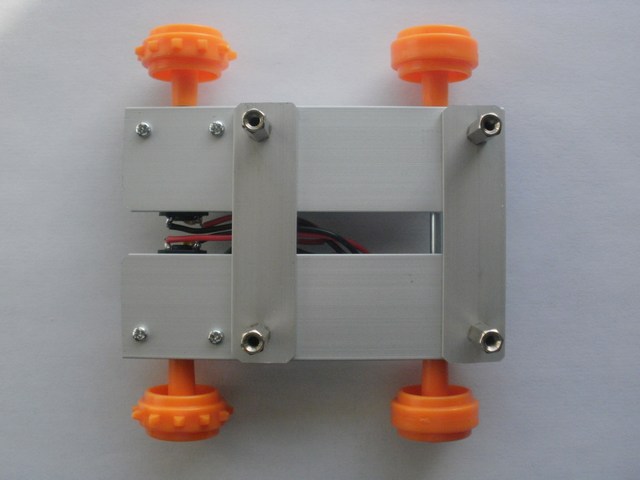
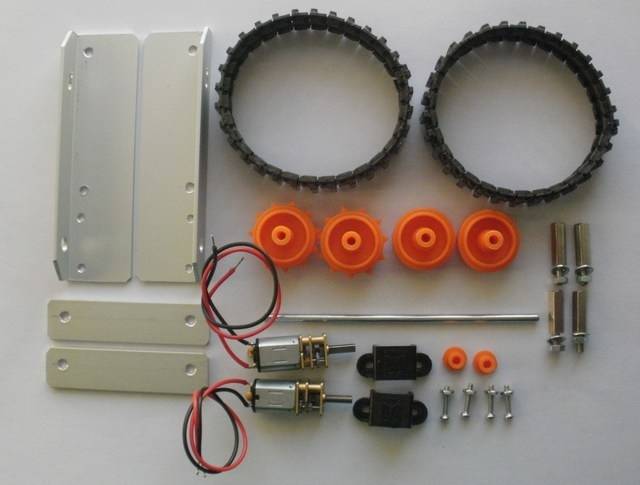
Fasi per la costruzione robot cingolato
Nello specifico articolo sono mostrate le parti costituenti il telaio, i motori e i cingoli e descriveremo le fasi per la costruzione del robot cingolato.






Controllo tramite stazione di controllo
Una volta terminata la costruzione del robot cingolato, vedremo come controllarlo.
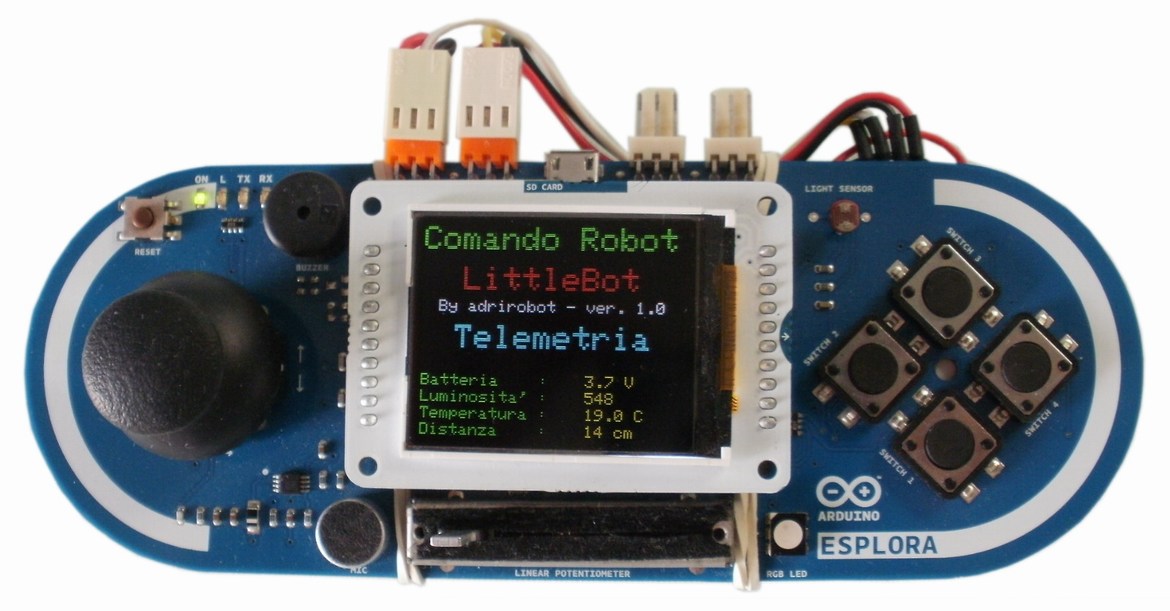
La prima versione del robot prevedeva il controllo tramite dei componenti montati sulla scheda di controllo rappresentata dalla Arduino ESPLORA. La stazione di controllo di Little BOT (vedere specifico articolo) è formata dai seguenti componenti:
- Scheda Arduino esplora con display TFT
- Batteria Li-ion
- Scheda caricabatteria/alimentazione con Batteria Li-ion
- Cavi di collegamento
- Modulo Bluetooth BlueSMiRF Silver
Controllo tramite App Bluetooth Electronics
Si utilizzerà una App (vedere articolo) chiamata Bluetooth Electronics, che permette di realizzare una propria interfaccia di comando che tramite il proprio dispositivo Android.
Sul sito ww.keuwl.com si potranno trovare ulteriori informazioni e una biblioteca contenente esempi di programmazione.
Per la realizzazione dei propri pannelli di comando, sono disponibili una vasta scelta di controlli raggruppati in 9 diversi tipi: testi, pulsanti, interruttori, cursori, pad, accelerometri, indicatori, grafici e terminali.
Vedere LittleBOT – App per il controllo robot

Articoli pubblicati sul web che parlano del robot
In questa pagina sono riportate le riviste e gli articoli che trattano della costruzione e uso del robot Little BOT

Presentazione del robot
Articolo pubblicato il 25 dicembre 2013 – Oggi parliamo di robot e vi presentiamo Little BOT, un piccolo robot dotato di una scheda di controllo su cui è installato un Arduino Nano. Il telaio è realizzato in alluminio ed è mosso da due piccoli moto riduttori realizzati completamente in metallo che muovono una coppia di cingoli. Il robot è dotato di alcuni sensori che gli permettono di rilevare parametri quali luminosità e temperatura. Un sensore frontale azionato da un servomotore permette al robot di scandagliare lo spazio frontale e misurare la distanza da eventuali ostacoli e in questo modo di evitarli. La presenza di un modulo Bluetooth permetterà di pilotare il robot in modo wireless tramite la scheda Arduino Esplora
Costruzione della scheda di controllo

Articolo pubblicato il 4 febbraio 2014 – Una volta montato il robot, potrà essere guidato tramite un collegamento wireless tipo Bluetooth effettuato con una scheda Arduino Esplora.
In quest’articolo, diviso in due parti, ne tratterà il montaggio: nella prima parte si analizzerà la scheda di controllo, mentre nella seconda passeremmo all’assemblaggio vero e proprio del telaio, installazione della scheda ed eseguiremo un primo collaudo .
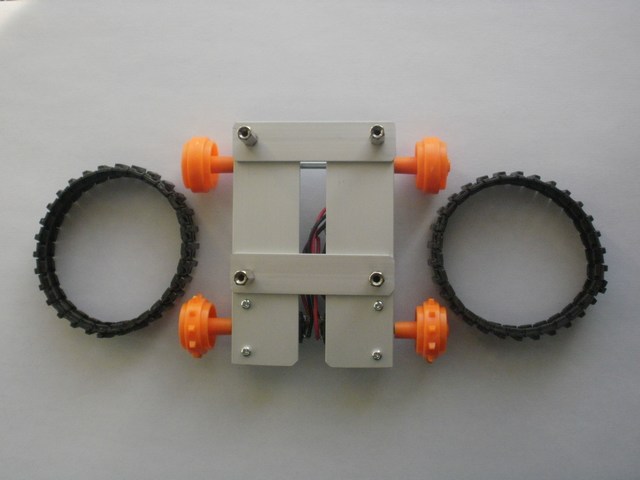
Costruzione del robot

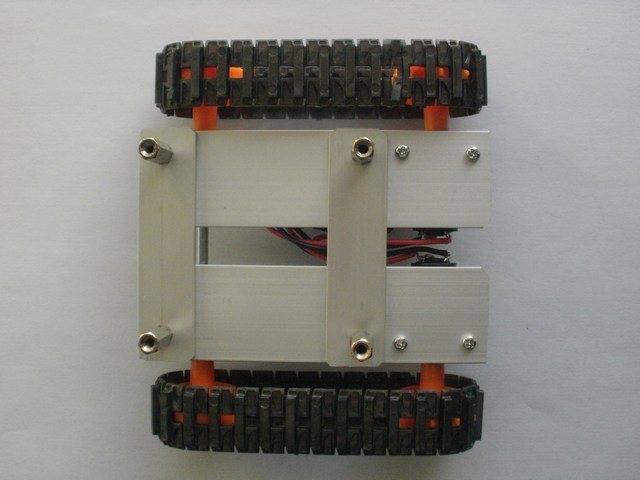
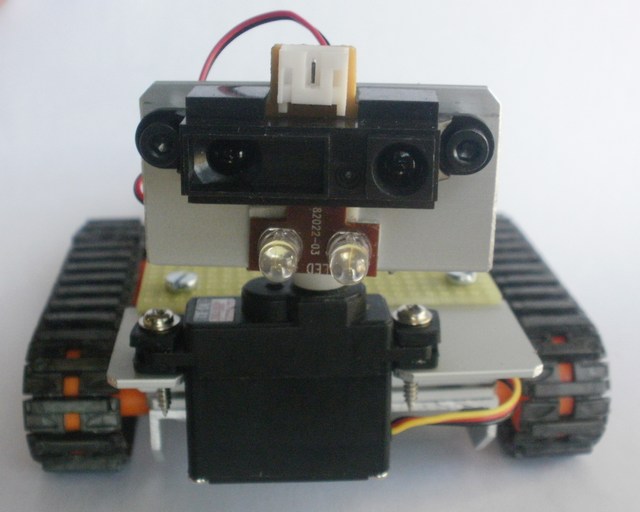
Articolo pubblicato il 13 marzo 2014 – Dopo aver costruito la scheda di controllo del robot Little BOT, passiamo alla costruzione del telaio: verrà realizzato con profilati in alluminio e su di esso sarà montato il gruppo motore che è formato da due piccoli moto riduttori che muovono a loro volta una coppia di cingoli.
Sul telaio trovano posto: la batteria di alimentazione, la scheda di controllo e un gruppo frontale formato da un servomotore (che aziona il sensore di distanza) e il faro già analizzato nel precedente articolo.
Una volta assemblato il tutto e collegata la scheda di controllo, potremo effettuare le prime prove di funzionamento.
In questa fase si utilizzerà una semplice applicazione per smartphone in attesa di utilizzare la scheda Arduino Esplora che analizzeremo nel prossimo articolo.
Programmi di gestione

Articolo pubblicato il 6 maggio 2014 – Questo articolo illustrerà come comandare il robot utilizzando la scheda Arduino Esplora equipaggiandola con un modulo Bluetooth, dotandola di una batteria che la renderà autonoma e si farà riferimento a quanto appreso in alcuni articoli già pubblicati su Elettronica Open Source.
Per migliorare l’affidabilità della stazione di controllo, rispetto a quanto in precedenza pubblicato, il modulo di alimentazione è ora rappresentato da un’unica scheda che comprende il caricabatteria, l’alimentatore e un sistema per il controllo dello stato di carica.
Per quanto riguarda il programma di controllo, sarà possibile leggere sul display della scheda Arduino Esplora lo stato dei sensori installati sul robot.
EOS BOOK
Alcuni degli articoli citati sopra sono sono stati anche inseriti all’interno degli EOS BOOK pubblicati ogni mese che raccolgono gli articoli più interessanti pubblicati durante quel mese sul blog Elettronica Open Source.



