

Il kit robot magician chassis è una base per robotica prodotta dalla DAGU Hi-Tech Electronic Robotics.
È dotato di due moto riduttori con ruote da 65 millimetri e una ball caster posteriore, le piastre del telaio sono realizzati in plastica acrilica e presentano una grande varietà di fori di montaggio per sensori, schede di controllo, ecc.
NOTA – La base robot è stata utilizzata per la costruzione del robot Magic BOT. Il progetto completo è stato presentato sulla rivista n°324 della rivista Fare Elettronica in edicola nel mese di Giugno 2012.
Basta imbullonare le due piattaforme pre-tagliate insieme, collegare i motori e ball caster e aggiungere il controller di robotica preferito. Questo kit include tutti i componenti necessari per assemblare il telaio e un porta-batteria 4xAA con terminazione a jack. Nella confezione sono presenti le semplici istruzioni di montaggio

Indice
Contenuto del kit robot magician chassis
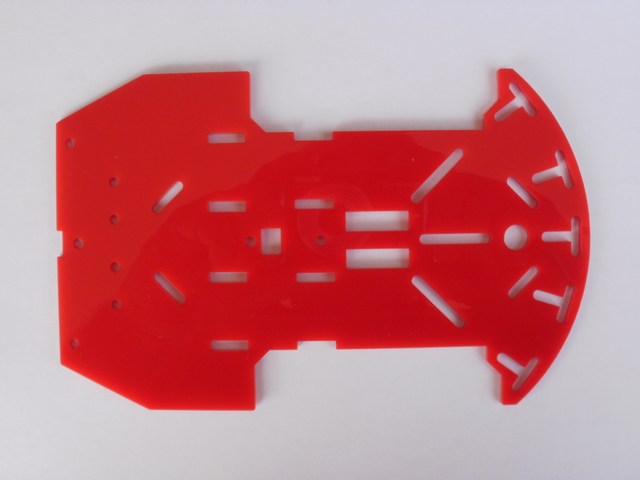
- Materiale telaio: Plastica acrilica
- Dimensioni: 110 x 174 millimetri
- Massima tensione di alimentazione dei motori: 6VDC
- Velocità a vuoto: 90 ± 10rpm
- Assorbimento:190mA (max.250mA)
- Coppia: 800gf.cm
- Corrente di stallo: ~ 1A
- Ruote:Diametro 65mm per 30mm di larghezza, cerchi di plastica con gomma piena
- Alberi:Doppia uscita, con presenza ruota per encoder


Particolari costruttivi del robot








Fasi di montaggio del robot

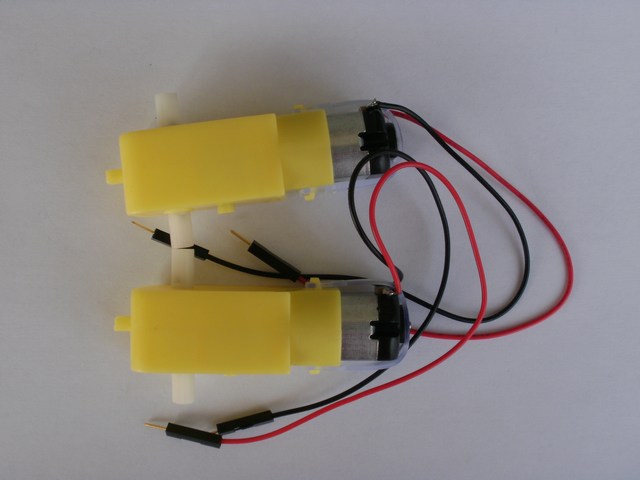
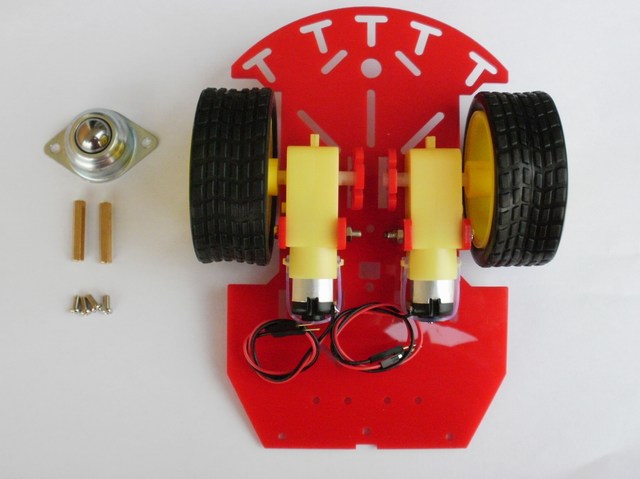
Particolari necessari: 2 motoriduttori, dischi per encoder
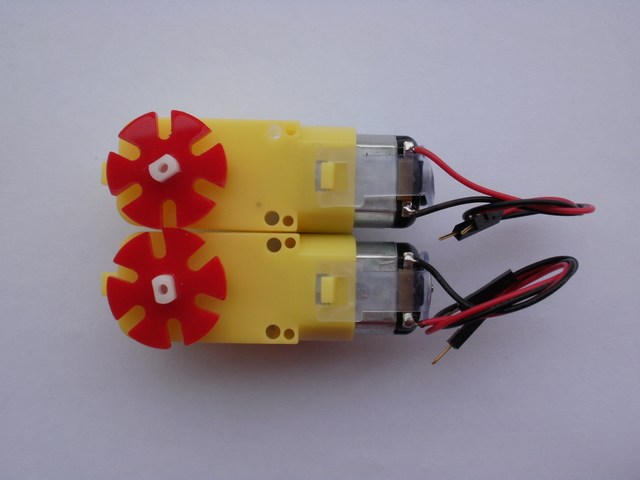
Inserire i dischi encoder sull’albero, premendo con delicatezza
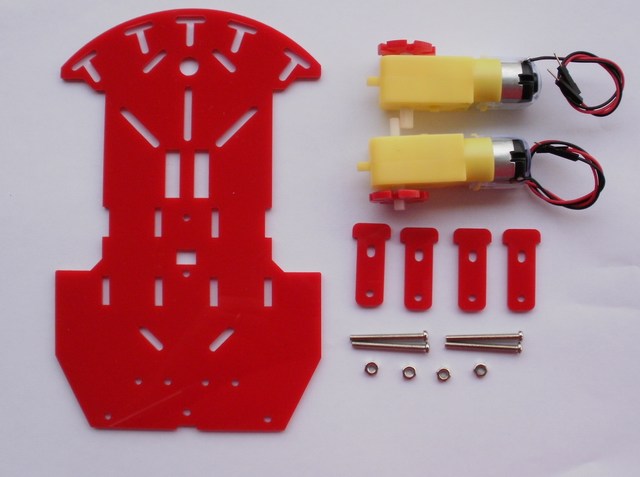
Particolari necessari: telaio inferiore, due motoriduttori, supporti per motoriduttori, 4 viti M3x30, 4 dadi M3

Inserire i supporti per riduttori nelle apposite scanalature e fissarle con le viti e i bulloni
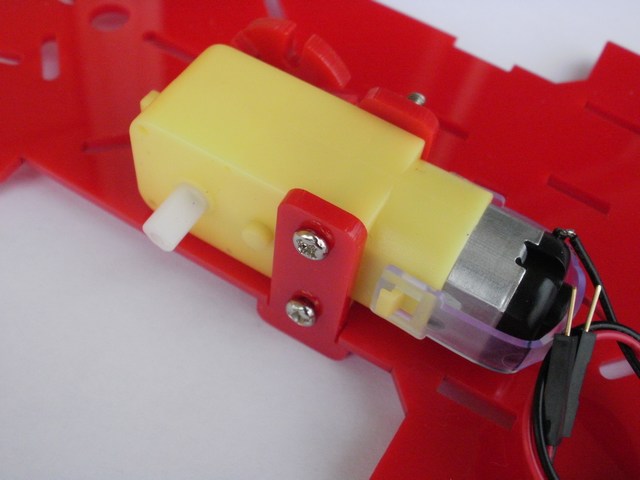
Nello stringere i bulloni non forzare eccessivamente
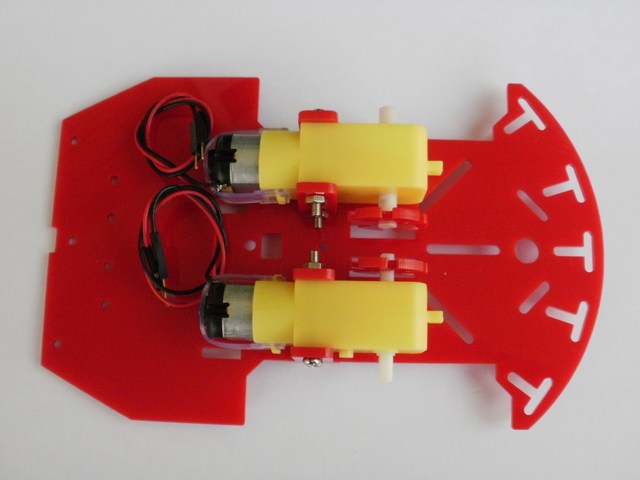
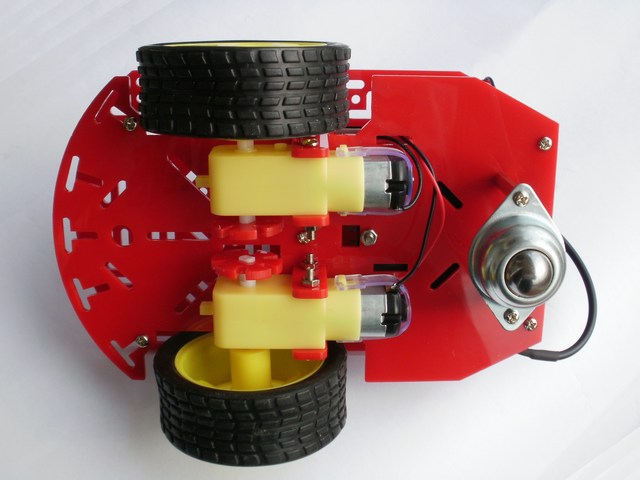
Come si presentano i due mo riduttori fissati al telaio inferire

Particolari necessari: telaio inferiore con moto riduttori, due ruote
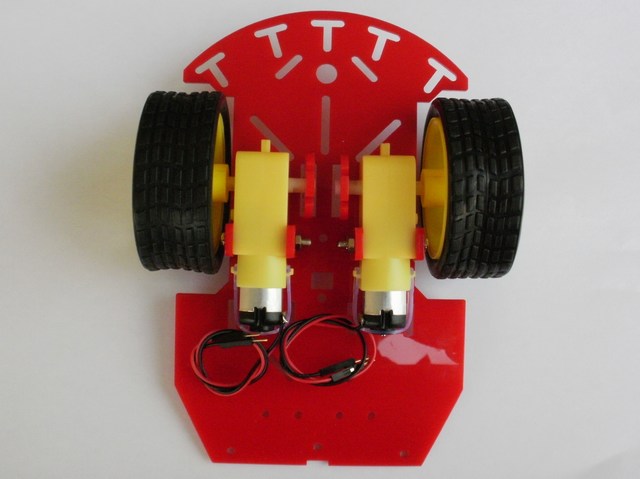
Inserire le ruote sugli alberi dei motoriduttori senza forzare eccessivamente
Particolari necessari: Telaio inferiore, ruota omnidirezionale, 2 distanziali L22, 2 viti M3x6 , 2 viti M3x10 svasate

Fissare i distanziali al telaio inferiore utilizzando le due viti M3x10 svasate. Fissare la ruota omnidirezionale ai distanziali usando due viti M3x6

Particolari necessari: Porta batteria, 2 viti M3 x 6, 2 dadi M3
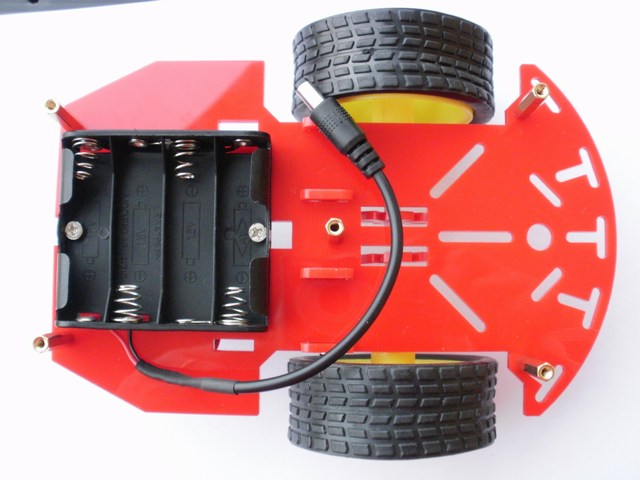
Fissare il portabatteria al telaio inferiore mediante le viti e i dadi.
Dettaglio fissaggio del porta batterie

Materiale necessario: 5 distanziali L=25, 5 viti M3x6
Fissare i distanziali al telaio inferiore mediante le viti

Dettaglio fissaggio distanziale
Particolari necessari: Telaio inferiore pre-montato, telaio superiore, 8 viti M3x6, 3 distanziali L=10mm

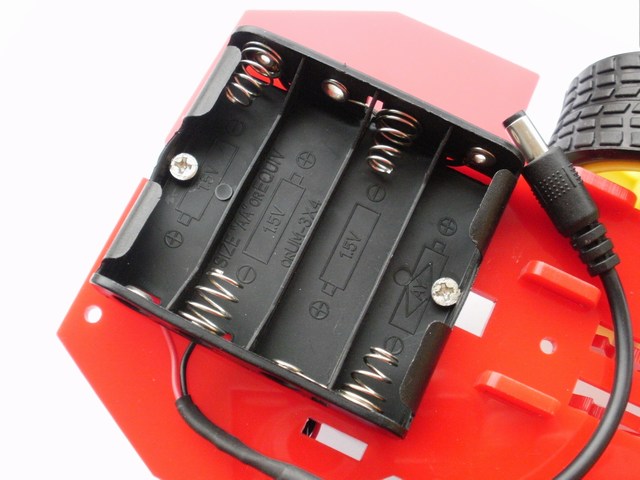
Inserire 4 batterie AA da 1,5 V all’interno del portabatteria
Fissare i distanziali L=10mm con le viti M3X10 per il fissaggio della scheda di controllo
Fissare il telaio superiore alla parte inferiore mediante 5 viti M3x6
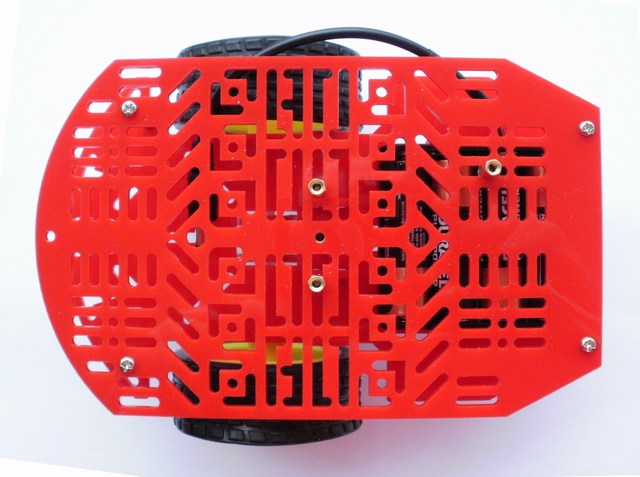
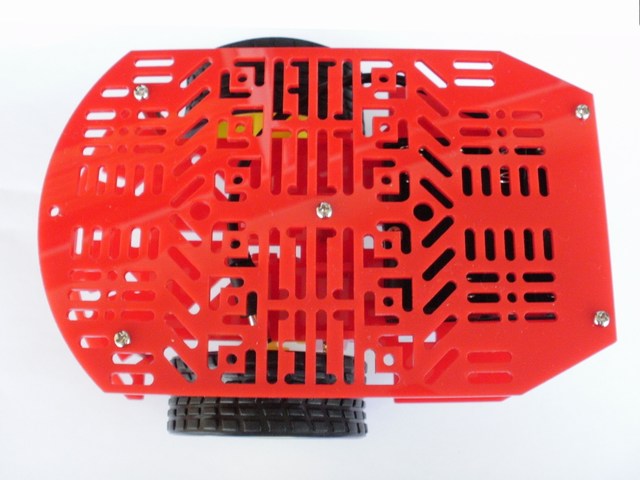
Dettaglio inferiore del robot montato
Dove trovare il telaio
Il sensore singolo può essere trovato anche sul sito TechMaker, il codice prodotto è RO482171, ricordate di inserire il codice “ADRIROBOT” per ottenere uno sconto del 3%.
![]()
Progetto robot Magic BOT
La base robot è stata utilizzata per la costruzione del robot Magic BOT.



Il progetto completo è stato presentato sulla rivista n°324 della rivista Fare Elettronica in edicola nel mese di Giugno 2012.
Componenti del robot:
- Telaio Magician Chassis
- Scheda Arduino UNO R3
- Shield Modkit MotoProto
- Microtelecamera CMOS
- Modulo Easy Bluetooth o Modulo BlueSMiRF-42 RN



Per il controllo del robot sarà poi necessario:

Sotto è possibile scaricare il pdf con il progetto completo.

