Nei precedenti articoli abbiamo visto l’unboxing del kit e la costruzione del robot 4WD Mecanum della Keyestudio:
- KS4034 Robot 4WD con Micro:bit della Keyestudio – Presentazione
- KS4034 Robot 4WD con Micro:bit della Keyestudio – Montaggio
Analizziamo ora in dettaglio i vari componenti che lo formano:

Indice
Descrizione del robot
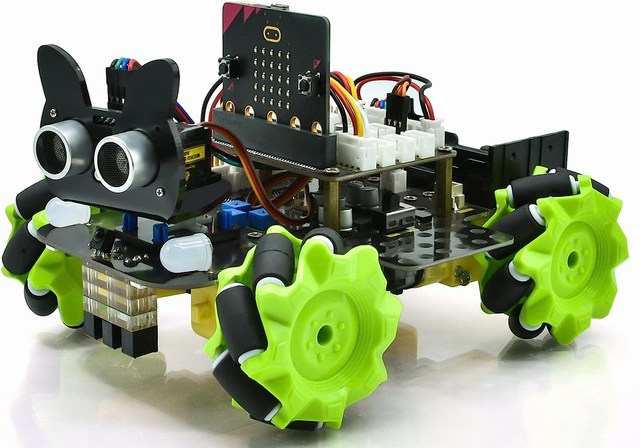
Questo Robot 4WD con ruote tipo Mecanum è di tipo intelligente, basato sulla scheda di controllo micro:bit. E’ composto da una piastra di base PCB con sensori, driver di azionamento del motore integrati, 4 motoriduttori in CC, ruote Mecanum, vari moduli e sensori e parti realizzate con pannelli acrilici.
Abbastanza facile da assemblare, con una piattaforma di programmazione di tipo grafico online di Microsoft Make Code per programmare la scheda di controllo micro: bit.

Si potrà così sperimentare il divertimento della creazione e migliorare anche le abilità pratiche. Si potranno anche apprendere nuove abilità di programmazione.
MakeCode per micro:bit è l’ambiente di programmazione grafica più utilizzato sul sito ufficiale di micro:bit. Si basa sull’ambiente di programmazione grafica sviluppato dal progetto open source di Microsoft.
Questa programmazione grafica può anche essere convertita in linguaggi di codice, python e linguaggio java script, rendendo più accessibile l’apprendimento della programmazione.
Allo stesso tempo, la programmazione Makecode può essere simulata o programmata per componenti elettronici reali.
| Descrizione | Valore |
|---|---|
| Tensione ingresso porta connettore: | DC 6V-9V |
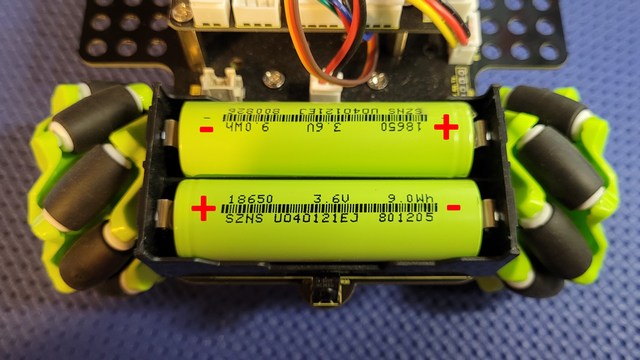
| Alimentazione batterie: | 2 x 18630 3,6V (7,2V) |
| Tensione operativa del sistema della scheda driver: | 5V |
| Tensione di lavoro scheda micro: bit | 3,3 V |
| Consumo energetico operativo standard: | circa 2,2 W |
| Potenza massima assorbita | 2W |
| Velocità del motore | 200 RPM |
| Intervallo di temperatura di lavoro | 0-50℃ |
| Dimensioni robot: | 140x175x115 mm |
| Peso con batterie | 550 g |


Video dell’unboxing

Montaggio del robot
Per le operazioni di montaggio del robot vedere lo specifico articolo KS4034 Robot 4WD con Micro:bit della Keyestudio – Montaggio

Caratteristiche di alcuni componenti
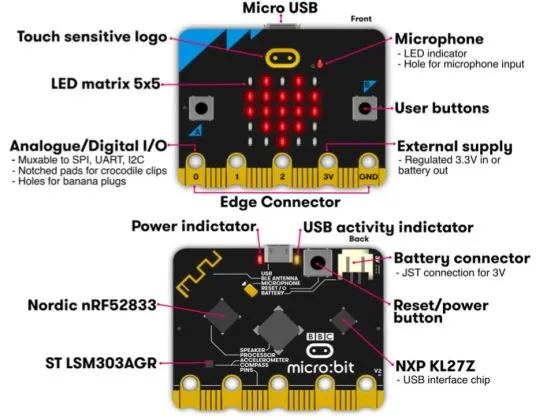
Scheda di comando del robot – BBC micro:bit V2.21
Il BBC micro:bit (Datasheet Microbit 2) è completamente programmabile in modo da poter facilmente dare vita alle vostre idee! Il micro:bit dispone di serie, di varie risorse hardware come un display a 25 LED, pulsanti, altoparlante incorporati, connettività Bluetooth e sensori di temperatura, movimento e luce, un accelerometro, un logo sensibile al tocco e una modalità sleep/off integrata.
 È compatibile con diversi editor di codice online gratuiti progettati per diversi livelli di conoscenza in modo da trovare quello che si adatta alla vostre capacità. On line sono disponibili una quantità infinita di progetti gratuiti, piani di lezione e attività da provare.
È compatibile con diversi editor di codice online gratuiti progettati per diversi livelli di conoscenza in modo da trovare quello che si adatta alla vostre capacità. On line sono disponibili una quantità infinita di progetti gratuiti, piani di lezione e attività da provare.
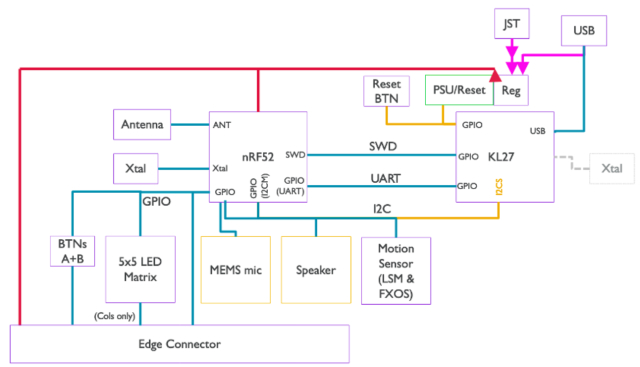
Schema a blocchi
Caratteristiche
- CPU ARM Cortex-M4 (Datasheet NORDIC nRF52833);
- Sensore di movimento: ST LSM303 (Datasheet) in cui sono presenti: accelerometro 3D, sensore magnetico digitale 3D, interfacce I2C, SPI;
- 25 LED a matrice sulla scheda dove è possibile far scorrere i messaggi o visualizzare i numeri;
- Microfono MEMS: Knowles SPU0410LR5H-QB-7 di tipo MEMS (Datasheet);
- Speaker, rappresentato da un buzzer tipo MLT-8530 (Datasheet);
- Connessione Bluetooth per interagire con internet o altri dispositivi via NXP KL27Z (Datasheet);
- 2 pulsanti di input dell’utente;
- Porta USB tramite micro USB per connessione con il PC per la programmazione o l’alimentazione 5V;
- Connettore per una batteria da 3V;
- Connettore a 20 pin lungo la parte inferiore della scheda;
- Consumo di corrente 300mA (fino a 190mA per l’elettronica collegata);
- Dimensioni: 4×5 cm.
Per altre informazioni vedere l’articolo BBC micro:bit V2 – Presentazione
Piastra telaio robot
Molti dei componenti del Keyestudio 4WD Robot trovano posto sulla piastra telaio del robot. Questa in realtà un PCB a doppia faccia e fori metallizzati opportunamente sagomato.
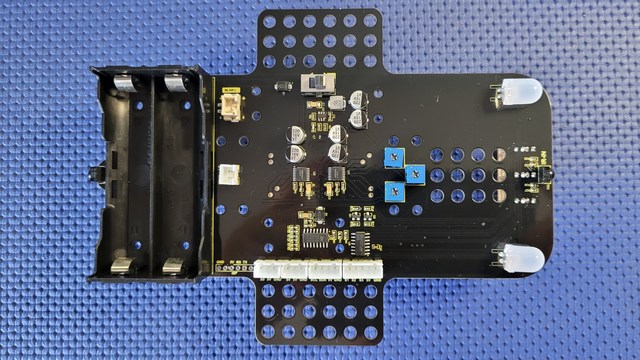
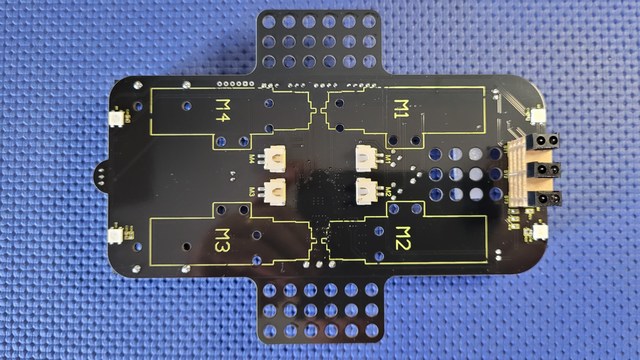
Sotto, la posizione dei principali componenti saldati sul PCB
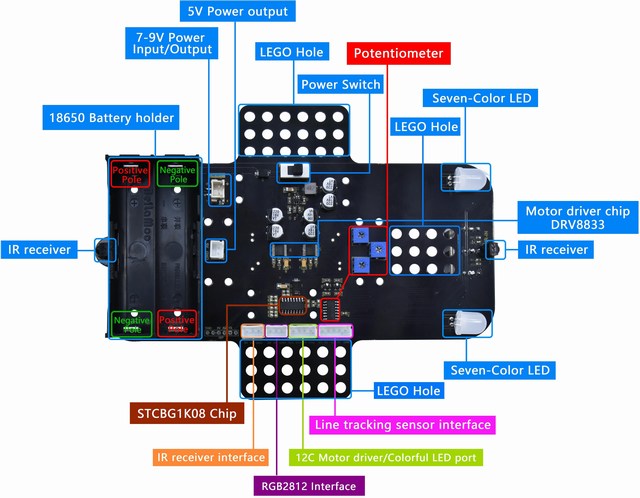
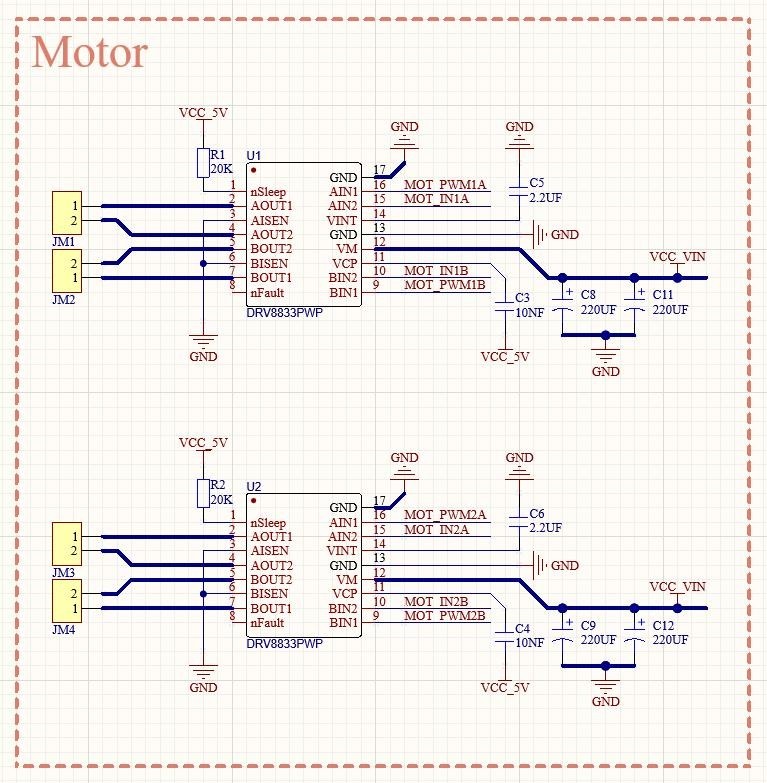
Il driver dei motori sono dei chip DRV8833, questi permettono di controllare la direzione di rotazione e la velocità dei 4 motoriduttori CC .

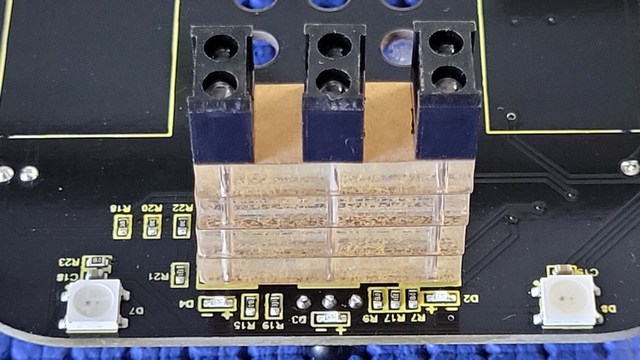
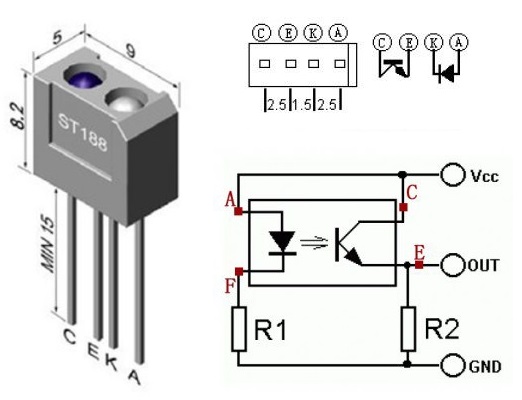
Sensore per segui linea
Il sensore del segui linea è formato da 3 sensori ST188, contiene un diodo emettitore IR e fototransistor ricevente IR. Quando i segnali a infrarossi emessi dal diodo emittente vengono ricevuti dal fototransistor ricevente attraverso la riflessione, vi sarà una variazione di tensione sul circuito.
Questi sono poi gestiti dal circuito di controllo.
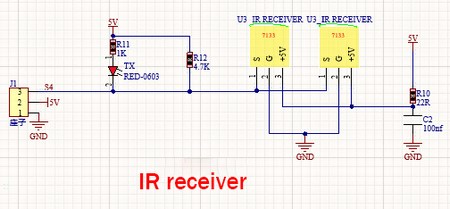
Ricevitore IR HS388D
Per pilotare tramite il telecomando in dotazione, il Keyestudio 4WD Mecanum Robot monta sulla scheda principale due ricevitore di raggi infrarossi , uno anteriore e uno posteriore al robot. Il sensore è dotato di un filtro ottico che non permette il passaggio della luce eccetto che a quella di 980 nm di lunghezza d’onda al suo sensore a fotodiodo interno. Il rivelatore infrarosso ha anche un filtro elettronico che permette il passaggio solamente a segnali con una frequenza di 38 kHz. Sul PCB è poi presente un led con relativa resistenza dal valore di 1 kΩ di limitazione che segnala la ricezione del segnale.

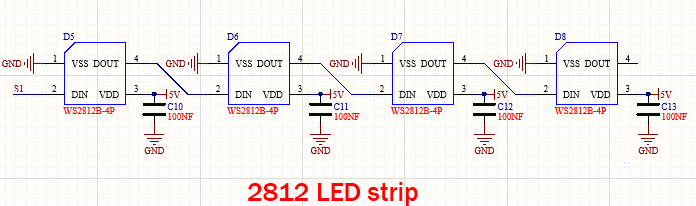
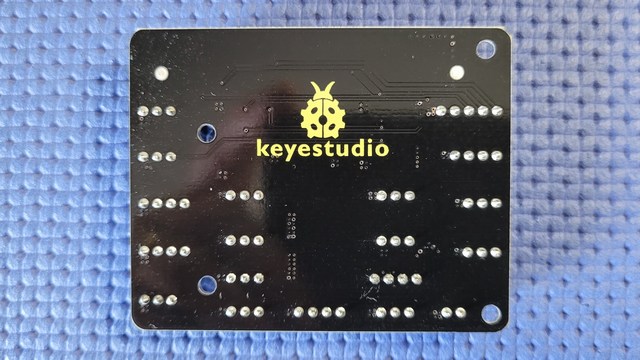
LED RGB WS2812
Nel lato inferiore del PCB sono presenti quattro LED tipo WS2812,. Si tratta di un led RGB a controllo digitale; utilizza un RGB SMD 5050, al cui interno è stato installato un minuscolo chip. In questo chip è presente un regolatore di luminosità a corrente costante che assicura un colore uniforme anche con differenti tensioni di alimentazione e un’interfaccia di comando seriale a una sola linea.
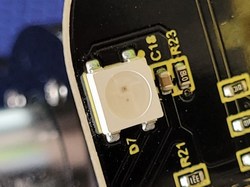
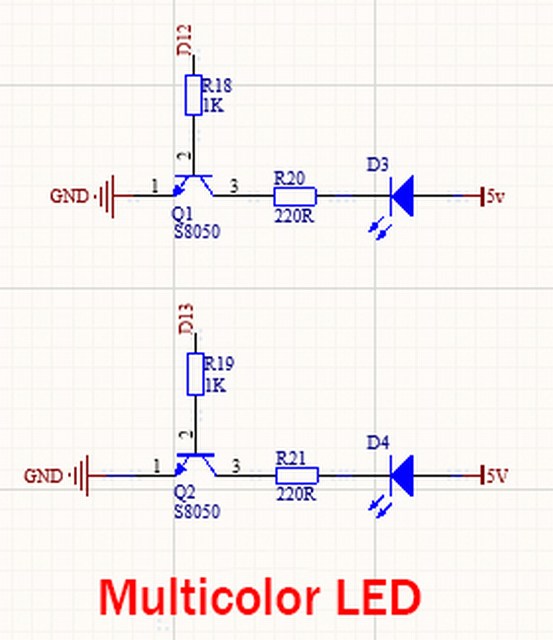
Led a sette colori
Quello visibile nella foto sembra un normale LED (∅10mm) di colore bianco ma è in grado di emettere 7 colori. Può inoltre lampeggiare automaticamente in diversi colori per creare effetti di luce quando viene attivato.

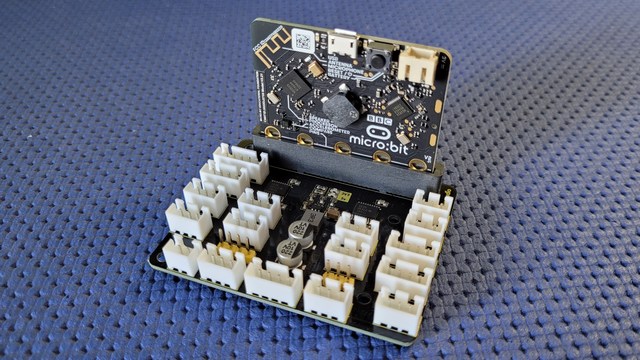
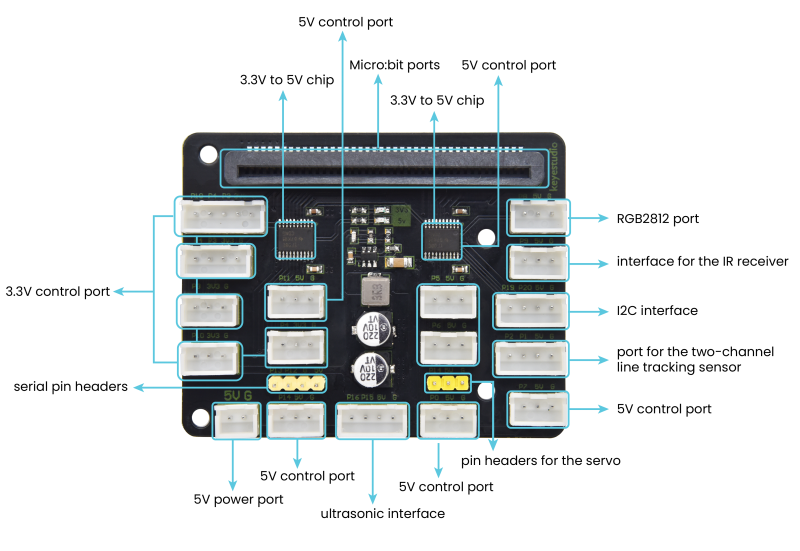
Scheda di espansione Micro bit Keyestudio
Per il collegamento dei componenti del Keyestudio 4WD Robot, viene fornita la scheda di espansione. Presente nel kit, ha codice KS4030 (vedere la sua pagina WIKI), facilita l’interfacciamento della scheda Micro:bit e i sensori.
 Per facilitare il cablaggio, dalla scheda di espansione Micro:bit sono presenti vari connettori polarizzati per il collegamento della scheda di controllo, dei motori e dei sensori.
Per facilitare il cablaggio, dalla scheda di espansione Micro:bit sono presenti vari connettori polarizzati per il collegamento della scheda di controllo, dei motori e dei sensori.

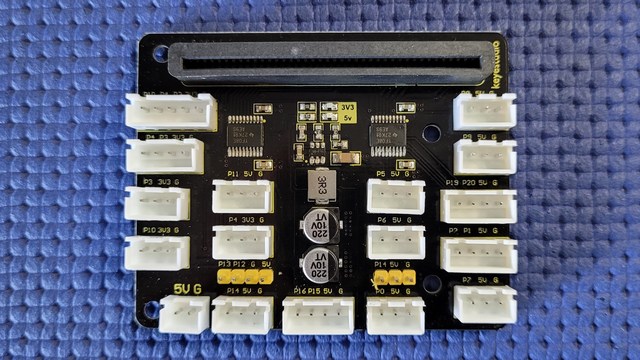
 Sulla scheda è presente un circuito con due chip TXS0108E 8-Bit Bi-directional, Level-Shifting, Voltage Translator (vedere datasheet) che permettono l’interfacciamento senza danni dei dispositivi esterni.
Sulla scheda è presente un circuito con due chip TXS0108E 8-Bit Bi-directional, Level-Shifting, Voltage Translator (vedere datasheet) che permettono l’interfacciamento senza danni dei dispositivi esterni.
| Tensione di lavoro: | 3,3÷5 V |
| Corrente: | 500 mA |
| Potenza massima: | 2,5 W |
| Temperatura di esercizio: | 0÷50°C |
| Interfaccia: | 2 CHIP traslatori di livello bi-direzionali TXS0108E 8-Bit |
| Diametro fori di fissaggio: | 3 mm |
| Dimensioni: | 70,2 x 56 x 1,6 mm |
| Peso: | 25,1 g |
L’ alimentazione è fornita tramite il box batteria al litio con un connettore PH2.54 integrato e un cavo micro USB connesso alla scheda Micro:bit.
Sono presenti quattro fori da 3 mm per il fissaggio sulla scheda base.
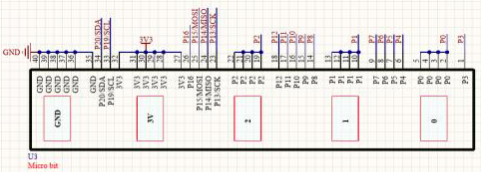
Sotto è riportata la tabella che riporta a quali porte della scheda Micro:bit sono collegati i vari sensori e dispositivi del robot.
| Pin Micro:bit | Sensore |
|---|---|
| P10 P4 P3 | Sensore di tracciamento della linea ST188 |
| P14 | Micro servo 9G |
| P7 | 4 LED WS2812RGB |
| P0 | 2 Ricevitori IR tipo HS388D |
| P15 P16 | Sensore ultrasonico HC-SR04 |
| P19 P20 (IIC) | 4 Motori |
| P19 P20 (IIC) | 2 LED a sette colori |
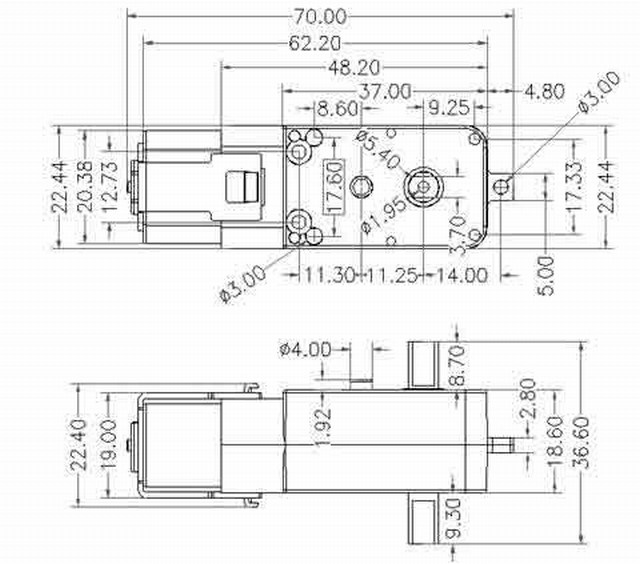
Motoriduttori
La Keyestudio 4WD Mecanum Robot Car è dotata di 4 motoriduttori DC, azionato da un normale motore a corrente continua.
Ha una scatola di riduzione che diminuisce la velocità del motore ma con una coppia maggiore.
Questo modello di motoriduttori ha corpo e ingranaggi in plastica e presenta l’asse del motore perpendicolare all’asse di uscita.
 Caratteristiche Elettriche:
Caratteristiche Elettriche:
- Tensione di funzionamento: 3 ~ 6V;
- Corrente continua a vuoto Corrente (3V): 150 mA +/- 10%
- Min. Velocità operativa (3V): 90 +/- 10% RPM
- Min. Velocità operativa (6 V): 200 +/- 10% RPM
- Coppia: 0,15 Nm ~ 0,60 Nm
- Coppia di stallo (6 V): 0,8 kg.cm
- Rapporto di trasmissione: 1:48
Caratteristiche meccaniche:
- Modalità uscita: 2 lati;
- Dimensioni del corpo: 70 x 22 x 18 mm
- Max. Diametro Asse di uscita: 5,4 millimetri;
- Peso netto: 30,6 g
Micro Servo 9G
Tra componenti del Keyestudio 4WD Robot troviamo poi un mini servomotore tipo 9G utilizzato per la rotazione del sensore sonar.
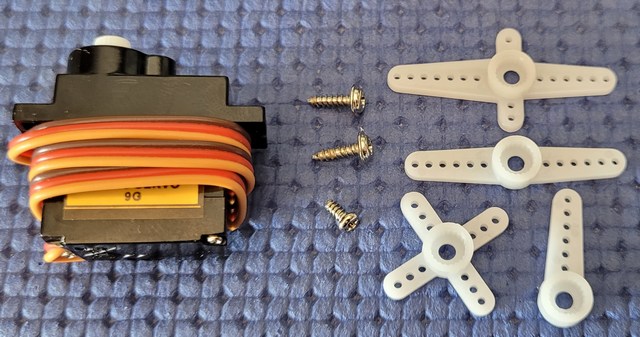
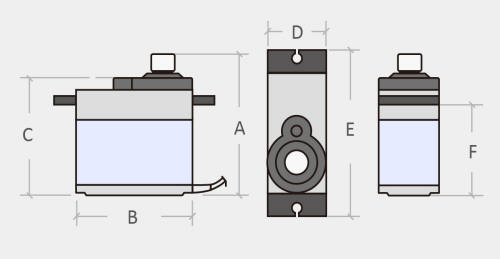
Nella tabella sottostante le sue caratteristiche
| Tipo servo | Micro servo Digital 9g - SG90 |
| Ingranaggi | In plastica |
| Tensione di esercizio | 4.8 v |
| Intervallo di temperatura: | 0 ℃ _ 55 ℃ |
| Larghezza banda morta: | 1us |
| Lunghezza cavo | 25 cm |
| Peso(g) | 9 |
| Connettore | JR |
| Coppia(kg/cm)(4.8v) | 1.8 |
| Velocità(sec/60deg) | 0.1 |
| A(mm) | 34.5 |
| B(mm) | 22.8 |
| C(mm) | 26.7 |
| D(mm) | 12.6 |
| E(mm) | 32.5 |
| F(mm) | 16 |
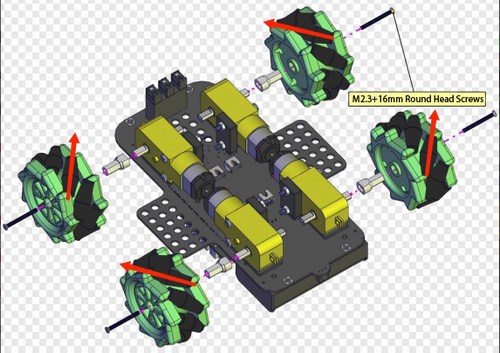
Ruote Mecanum
Nel Kit sono presenti 4 ruote omnidirezionali in grado di muoversi in qualsiasi direzione come andare dritto, obliquamente, orizzontalmente oppure ruotare a qualsiasi angolo con raggio zero.
Si tratta di ruote tipo Mecanum , è chiamata anche ruota Ilon dal nome del suo inventore, Bengt Erland Ilon.
Con una rumorosità molto bassa questo tipo di ruota può muoversi in modo stabile e flessibile durante il funzionamento, poiché la ruota si basa sulla tecnologia di trasmissione omnidirezionale è possibile controllare liberamente la propria auto robotizzata anche in spazi ristretti.
 Le ruote hanno un diametro di 58mm, robusti e resistenti agli urti sono composte da 9 piccoli rulli che sono realizzati in plastica e rivestiti con gomma siliconica di qualità ed alto attrito,
Le ruote hanno un diametro di 58mm, robusti e resistenti agli urti sono composte da 9 piccoli rulli che sono realizzati in plastica e rivestiti con gomma siliconica di qualità ed alto attrito,
Nota: sulle ruote sono di tipo diverso, due ruote sinistre e due ruote destre, prestare attenzione alla A e B riportate sul retro della ruota durante l’installazione
Sensore a ultrasuoni HC-SR04
Per la navigazione autonoma il Keyestudio 4WD Mecanum Robot, utilizza il sensore ad ultrasuoni HC-SR04 che ha un campo di misura che si estende da due centimetri a quatto metri e la precisione cha arriva a 1 cm.
Il modulo che viene montato su un servomotore che permette di “scandagliare” l’ambiente, comprende il trasmettitore a ultrasuoni e il relativo ricevitore con circuito di controllo.


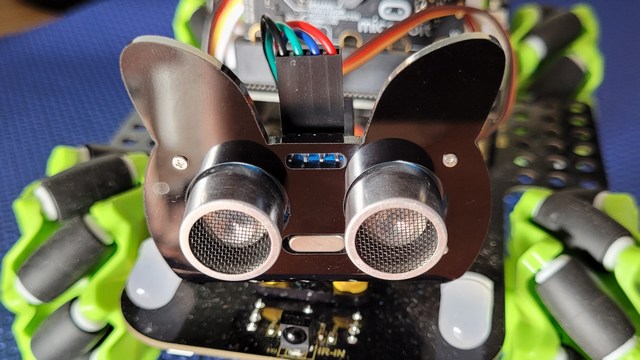
Questi sensori ad ultrasuoni non misurano direttamente la distanza, ma forniscono il tempo impiegato da un segnale sonoro per raggiungere un ostacolo e ritornare di nuovo al sensore.

Quando Arduino setta a 1 il Pin Trigger, il sensore invia 8 impulsi a ultrasuoni. Quando questi poi sono ricevuti, il sensore setta a 1 il pin Echo, viene quindi misurato il tempo che passa tra l’attivazione del pin Trigger ed il settaggio del pin Echo. Infine, nota la velocità del suono, converte il tempo misurato in una lunghezza e ricava quindi la distanza dell’ostacolo.

Telecomando raggi infrarossi
Tra i componenti del Keyestudio 4WD Robot è presente un telecomando wireless a infrarossi mini e ultrasottile. Sono disponibili 17 tasti funzione, l’emissione di infrarossi può raggiungere una distanza massima fino a 8 metri. Risulta adatto inoltre per il controllo di dispositivi interni di ogni tipo.
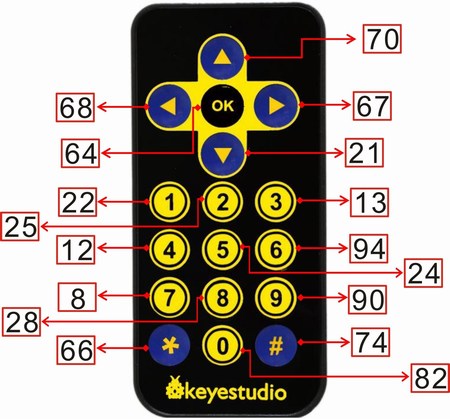
Specifica:
- Batteria: batterie a bottone CR2025 (non incluse)
- Distanza di trasmissione: fino a 8 m (a seconda dell’ambiente circostante, della sensibilità del ricevitore ecc.
- Angolo effettivo: 60°
- Corrente statica: 3-5uA, Corrente dinamica: 3-5mA
Alimentazione e batteria
Il Keyestudio 4WD Mecanum Robot Car è alimentato da due batterie 18650. Il portabatteria dell’auto è compatibile con qualsiasi tipo di batteria al litio 18650 (ricaricabile). Il caricabatteria non è compreso o presente, è possibile utilizzare un caricabatterie universale per caricare la batteria al litio 18650.