

Dopo aver costruito la scheda di controllo del robot Little Bot, passiamo ora ad analizzare le fasi di costruzione del telaio del robot.


Indice
Descrizione
Si utilizzeranno dei profilati in alluminio, e su di esso sarà montato il gruppo motore che è formato da due piccoli moto riduttori che muovono a loro volta una coppia di cingoli.
Sul telaio trovano ancora posto: la batteria di alimentazione, la scheda di controllo e un gruppo frontale formato da un servomotore, che aziona il sensore di distanza e il faro già analizzati nel precedente articolo.
Una volta assemblato il tutto e collegato la scheda di controllo, potremo effettuare le prime prove di funzionamento. In questa fase si utilizzerà una semplice applicazione per smartphone in attesa di utilizzare la scheda Esplora che analizzeremo nel prossimo articolo.

Componenti necessari
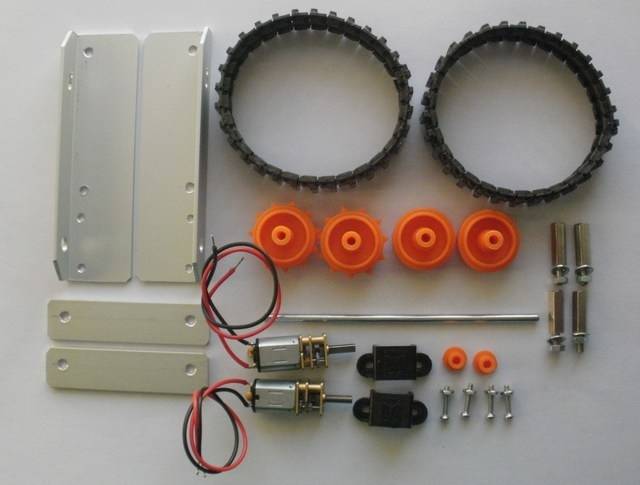
Per la costruzione del robot inizieremo dalla lista delle parti necessarie, per la localizzazione sul robot fare riferimento al disegno sottostante.
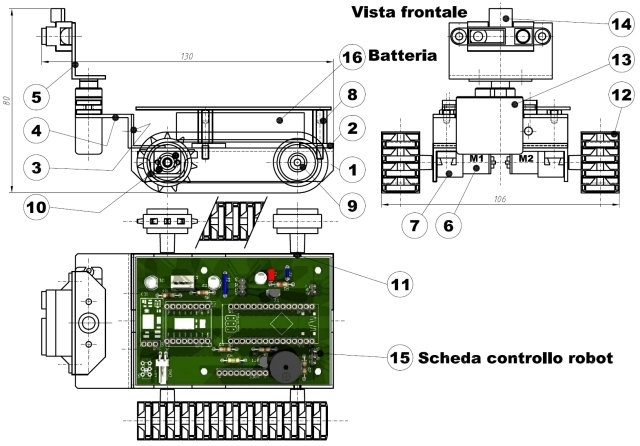
Prima di passare ad analizzare le fasi di costruzione del telaio del robot, vediamo l’elenco delle parti principali che formano il telaio stesso:
- Scheda di controllo [15] decritta nell’articolo Scheda controllo robot LittleBOT – Costruzione
- Batteria [16] Li-Ion con una tensione di 3,7 e una corrente di 1840 ma/h – ENIX Energies
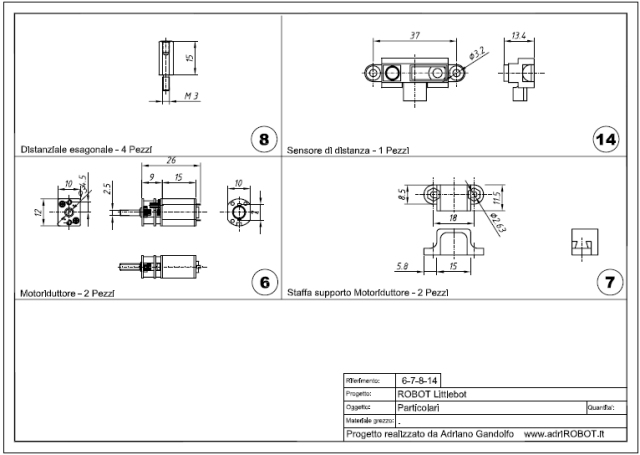
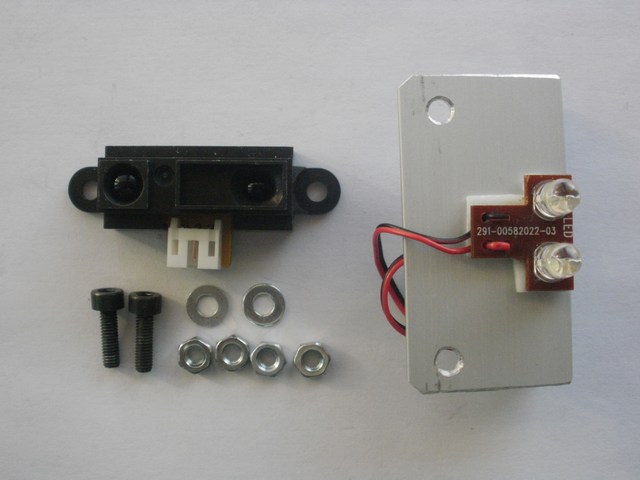
- Sensore di distanza[14] tipo GP2D120X prodotto dalla Sharp, citato nel precedente articolo
Pezzi meccanici:
- Supporto motore [1] – n°2 pezzi
- Traverse [2] – N° 2 pezzi –
- Staffa servomotore [3] – N° 1 pezzo
- Supporto servo [4] – N° 1 Pezzo
- Supporto sensore distanza [5] -N° 1 Pezzo
Minuterie meccaniche
- Distanziali esagonali M3 L= 15mm [8] -n° 4
- Viti testa cilindrica con intaglio M3 L= 8 – n° 4
- Dadi M3 – n° 12
- Rondelle piane Ø3,2 – n° 6
Motori, servomotori e loro supporti
- [6] N° 2 Moto riduttori in miniatura con motore a corrente continua con rapporto di riduzione 45:1. Acquistabili presso il sito di Futura Elettronica, codice prodotto 7300-MMG298
- [7] – N° 1 Coppia di supporti per moto riduttori, questi sono già venduti con le viti e dadi per il loro fissaggio. Acquistabili presso il sito di Futura Elettronica, codice prodotto 7300-MMGSUPP
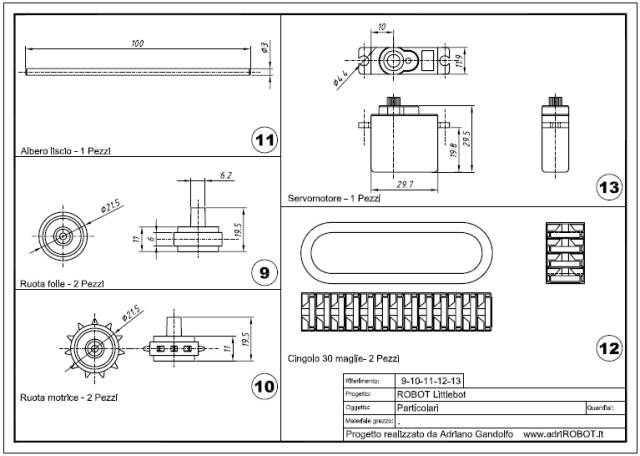
- N° 1 Mini Servo Hitec HS81 o equivalente [13]
I moto riduttori utilizzati, sono estremamente compatti e sono realizzati in metallo, per il suo montaggio occorre una coppia di staffe, questa acchiude gli ingranaggi altrimenti esposte. Le staffe sono venduti in coppia, e ciascuna staffa viene fornito con due # 2 viti e due dadi .
La qualità di questi moto riduttori è eccezionale e li rende adatti a qualsiasi tipo di applicazione. Sono disponibili con vari rapporti di riduzione, a seconda della velocità e della coppia richiesta.
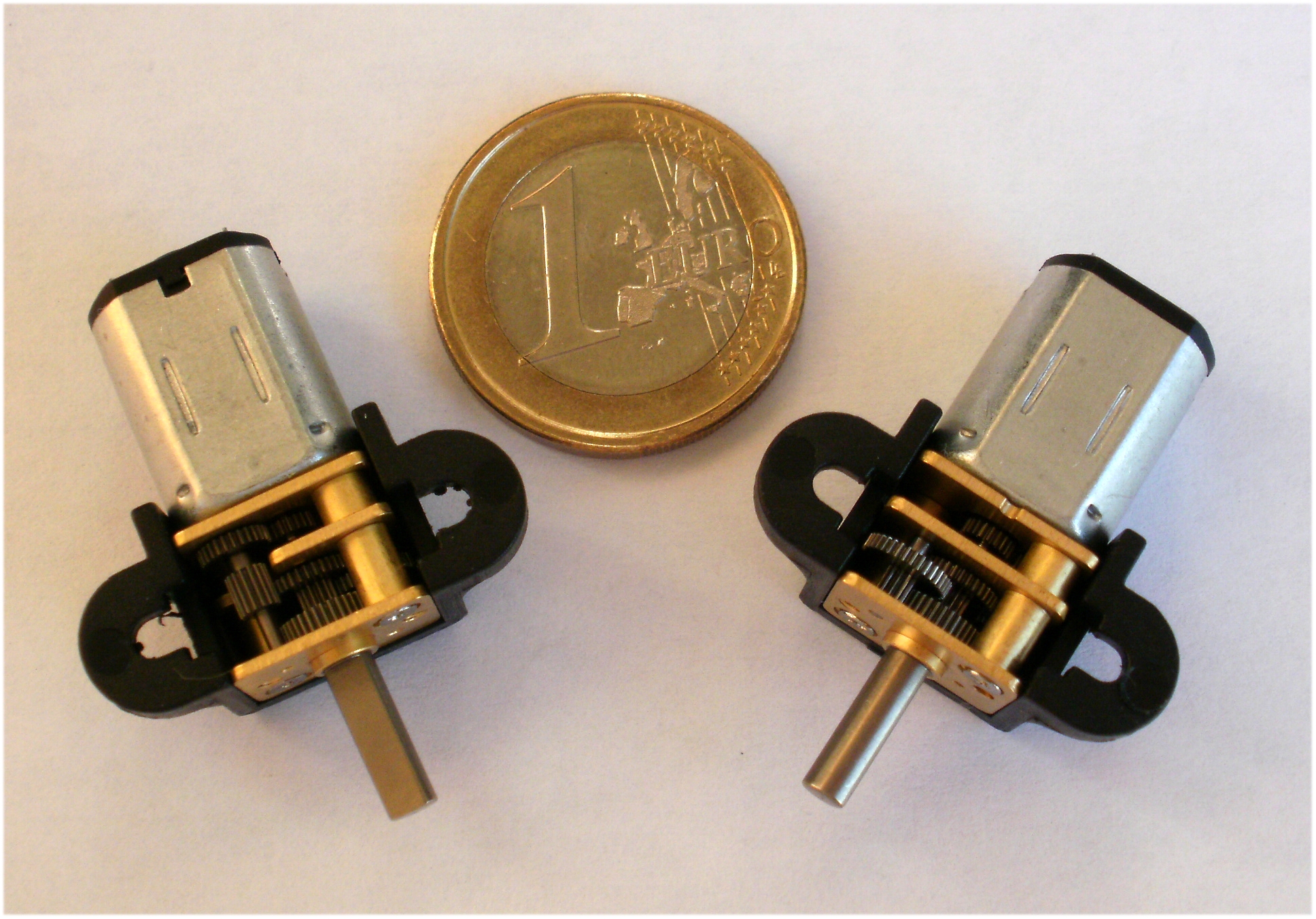
I motori sono destinati ad essere utilizzati a 6 V, anche se in generale, questo tipo di motori possono funzionare a tensioni sopra e sotto questa tensione nominale, per cui dovrebbero operare comodamente in 3-9 V gamma (rotazione può iniziare con tensioni di 0,5 V).
Con tensioni basse potrebbe non ruotare mentre tensioni superiori potrebbero ridurre la vita del motore.
![]()
 |
 |
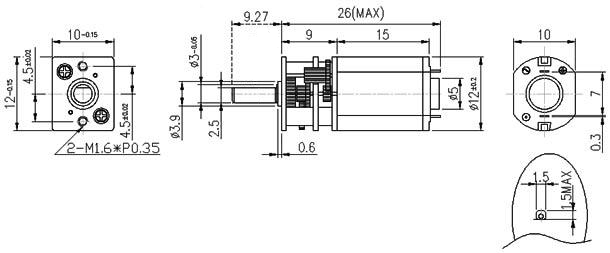
Caratteristiche
- Tensione nominale: 6 Vdc
- Rapporto di riduzione: 298:1
- Coppia massima: 1.8 kg-cm
- Velocità senza carico: 45 rpm
- Corrente di stallo: 360 mA
- Consumo senza carico: 30 mA
- Peso: circa 10 g
- Temperatura di esercizio: da -20°C a +60°C
Altro materiale
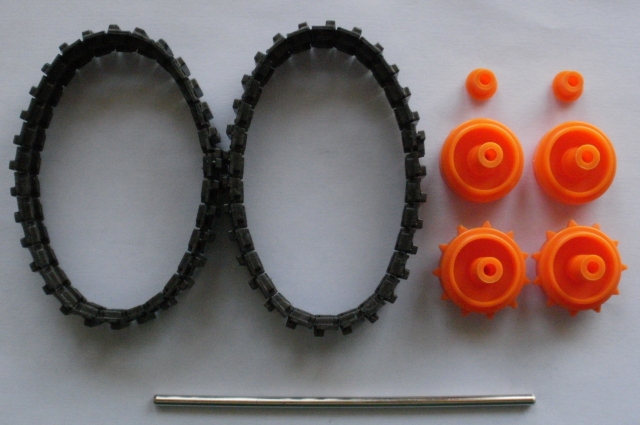
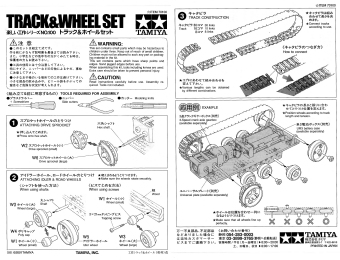
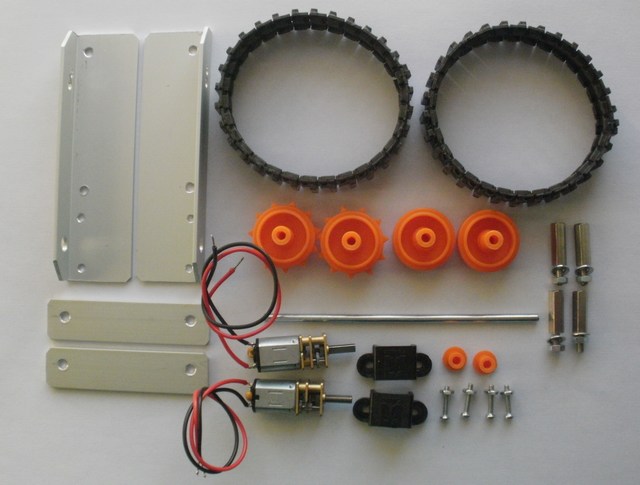
Una confezione Track and Wheel Set, acquistabili presso il sito di Futura Elettronica, codice prodotto 8218-TRACKSET, da cui estrarre:
• N° 2 spezzoni dei cingoli da 30 maglie [12];
• N° 2 ruote dentate Ø21,5 [10];
• N° 2 ruote folli Ø21,5 con n° 2 tappi [9];
• N° 1 albero liscio [11].

- spezzoni di filo rosso lunghezza ~12 cm – n° 2
- spezzoni di filo nero lunghezza ~12 cm – n° 2
- connettori tipo MOLEX – 22-01-2041 – Femmina terminali a capocorda 4 pin – n° 1
- connettori MOLEX – 22-01-2021 – Femmina terminali a capocorda 2 pin – n° 2
- condensatori multistrato 100nF (Codice RS 538-1427) – n° 2
Per muoversi Little BOT è dotato di una coppia di cingoli. Questi creati da un kit composto da ruote di vario tipo, assi, viti e cingoli in gomma componibili per realizzare veicoli cingolati di varie dimensioni.
Sono comprese le ruote dentate per trasmettere il moto.



- Spezzoni x 30 maglie – n° 2
- 2 spezzoni x 10 maglie
- 2 spezzoni x 8 maglie
- 2 Pignoni grandi
- 2 Pignoni piccoli
- 2 ruote folli grandi
- 6 ruote folli piccole
- 10 ruote piccole
- 12 tappi per ruote
- 5 Semiassi lisci Ø 3 l= 100 mm
- 1 semiasse esagonale l=100 mm
- 10 viti
- Viti e minuteria varia

Costruzione pezzi meccanici
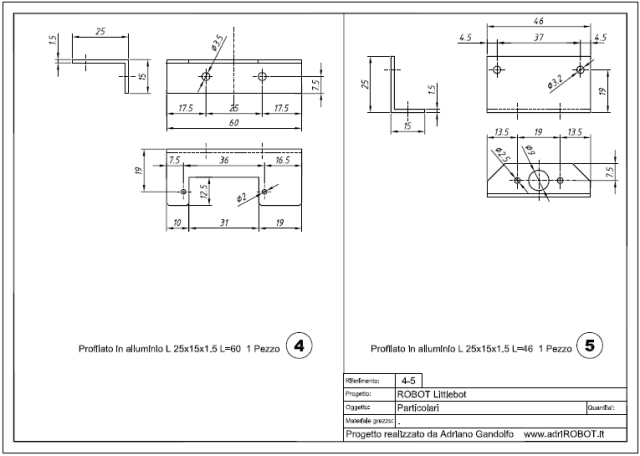
Il materiale base per la realizzazione del telaio del robot è rappresentato da profilati in alluminio di varie forme e dimensioni che potrà essere trovato presso una grossa ferramenta.
Occorre una barra per tipo delle seguenti misure:
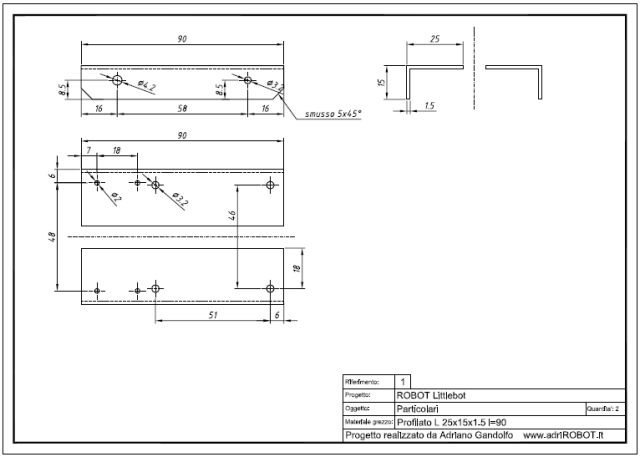
- L 25x15x1.5 ANGOLARE L ALLUMINIO 25x15x1,5 mm 2 m argento satinato
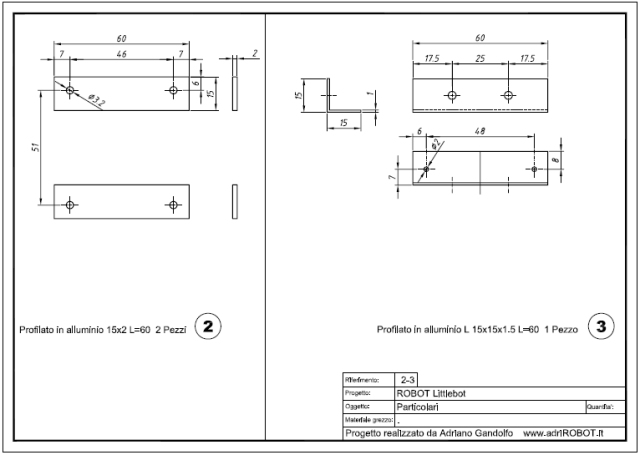
- L 15x15x1 ANGOLARE ALLUMINIO 15x15x1 mm 1 m argento satinato
- Piatto 15×2 PIATTO ALLUMINIO 15×2 mm 1 m argento satinato
Per le lavorazioni, sono necessari un seghetto per metalli e una lima da ferro.
Per le forature, occorre un trapano a colonna con le punte dei diametri indicati.
Si raccomanda di effettuare i tagli e le forature serrando i pezzi su una morsa interponendo eventualmente del materiale plastico per evitare di rovinare la superficie dei pezzi.
Le operazioni indicate producono dei trucioli di alluminio, quindi è fortemente consigliato l’utilizzo dei DPI di protezione: per esempio occhiali protezione in policarbonato e guanti per manutenzione, questi potranno essere trovati presso la stessa Ferramenta dove troverete i profilati.
Con questi materiali sono da costruirsi i particolari
• [1] 2 pezzi,
• [2] 2 pezzi,
• [3] 1 pezzo,
• [4] 1 pezzo,
• [5] 1 pezzo.
Per la loro costruzione si farà riferimento alle misure riportate sui disegni presenti negli allegati.
Assemblaggio dei particolari meccanici
Per il fissaggio dei vari particolari sono inoltre necessari:
- un cacciavite con la punta a taglio e uno con la punta a croce
- un paio di pinze
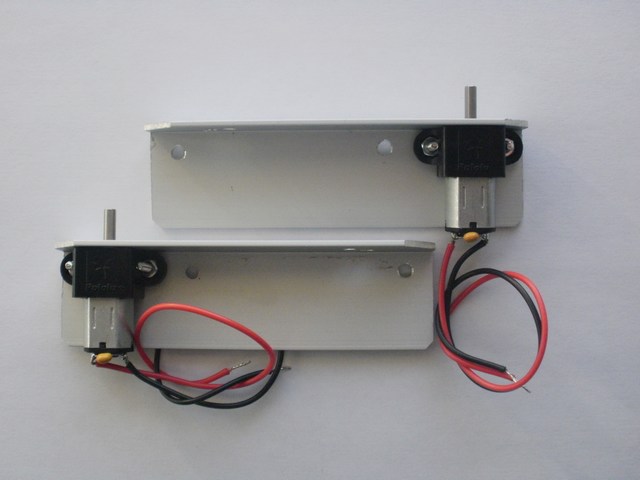
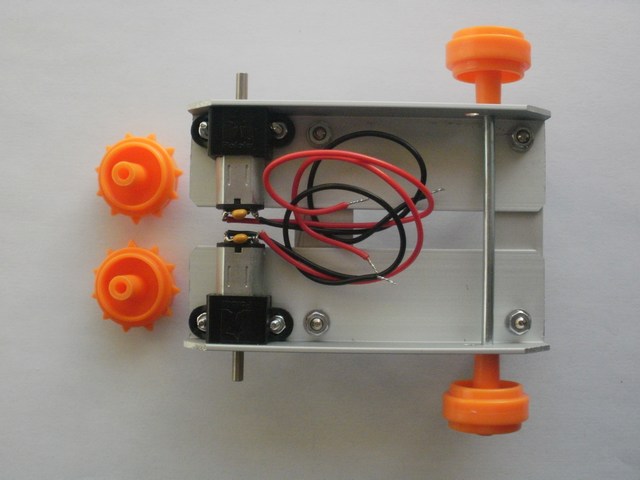
L’operazione preliminare sarà quella di saldare sui connettori del motore i cavi di alimentazione, per cui si salderà una coppia di cavi rosso/nero della lunghezza di circa 12 cm, facendo attenzione di saldare il cavo rosso in corrispondenza del simbolo [+] riportato sul corpo del motore.

Tra i due capi, salderemo anche un piccolo condensatore multistrato dal valore di 100nF.
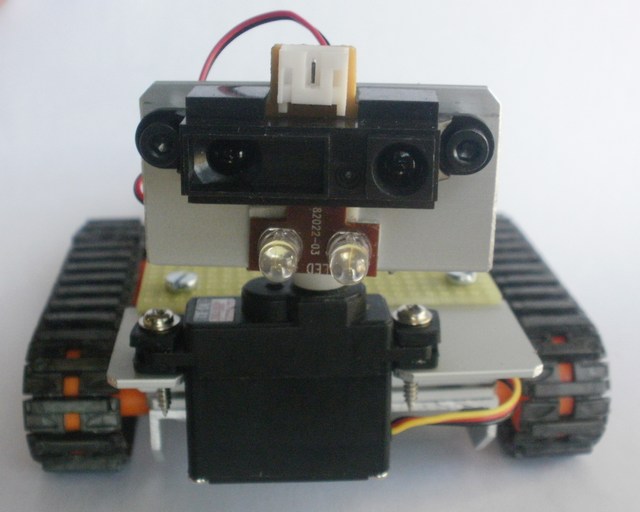
Montaggio del robot
Dopo aver realizzato i particolari ed aver recuperato i particolari possiamo passare ad analizzare le fasi di costruzione del telaio del robot
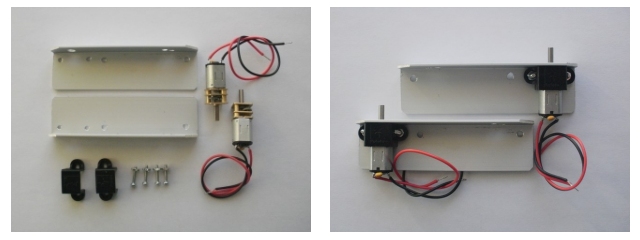
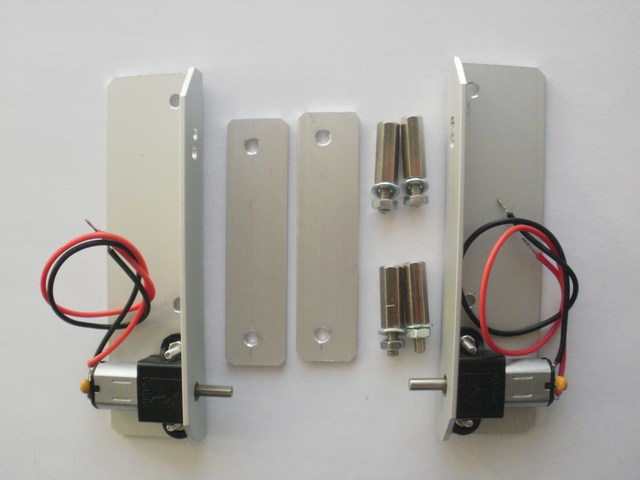
Si fisseranno a quanto punto i due moto-riduttori [6] ai particolari [1] utilizzando le staffe [7] e relative viti che sono fornite nella stessa confezione. Consiglio di non stringere troppo le viti per evitare di rompere il supporto.
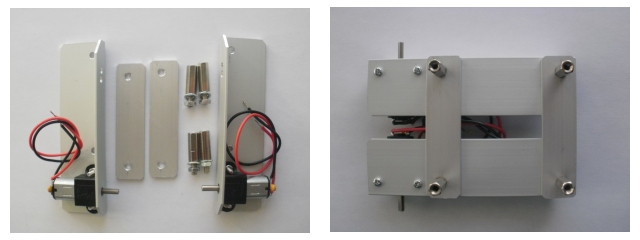
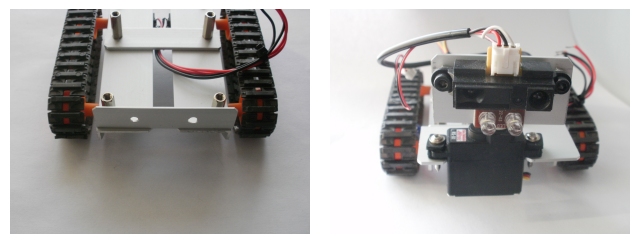
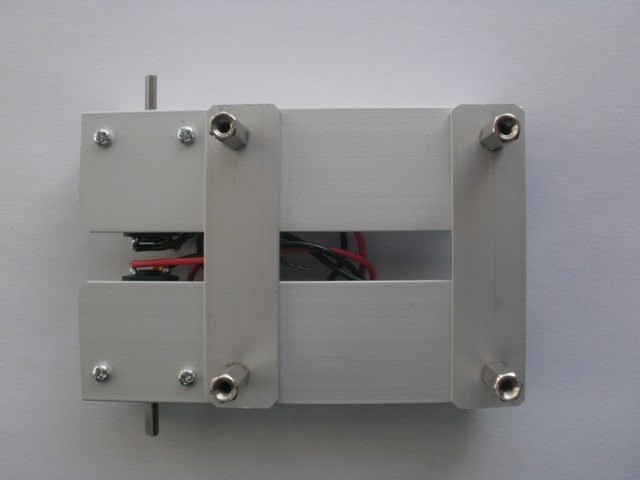
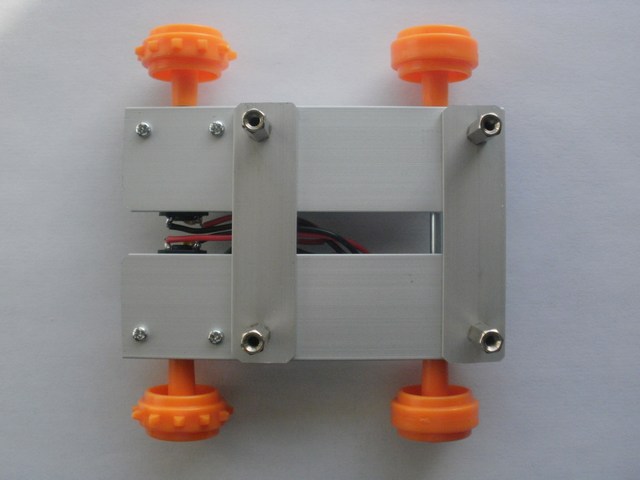
Ora si uniranno i due particolari appena montati utilizzando le traverse [2] fissandoli tramite i distanziali esagonali [8] (a cui sarà fissata in seguito la scheda di controllo) utilizzando per ognuno una rondella e un dato esagonale M3.
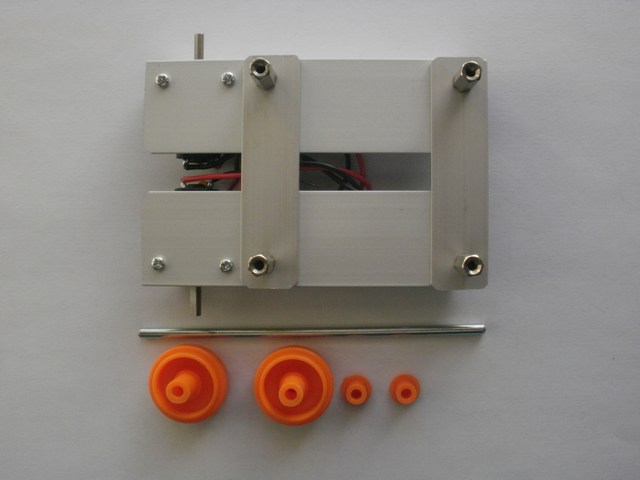
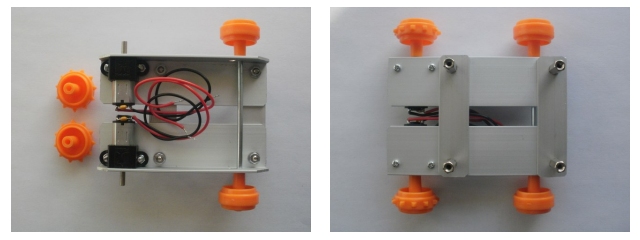 S’inserirà poi l’albero liscio da 3mm [11] fissandolo con le due ruote in plastica folli [11], sugli alberi a D del motore [6] si inserirà invece la ruota motrice [10], chiudendo il foro centrale con il relativo tappo.
S’inserirà poi l’albero liscio da 3mm [11] fissandolo con le due ruote in plastica folli [11], sugli alberi a D del motore [6] si inserirà invece la ruota motrice [10], chiudendo il foro centrale con il relativo tappo.
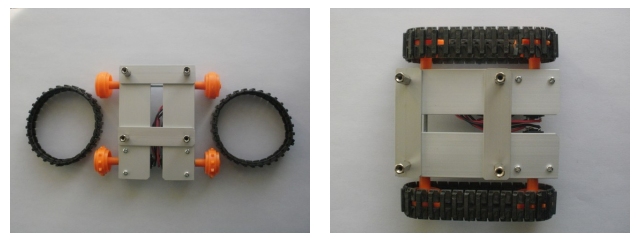
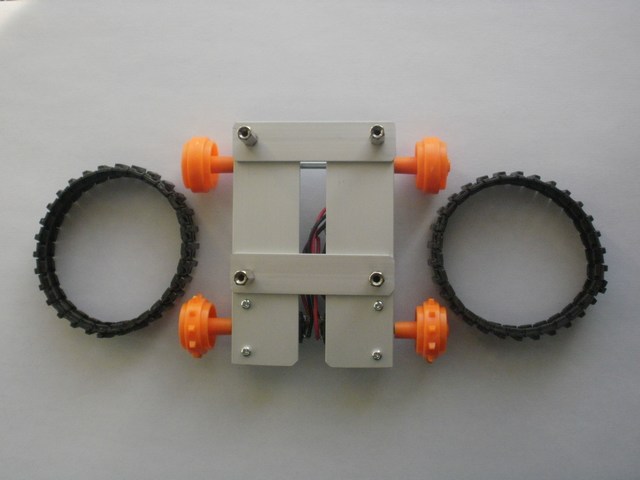
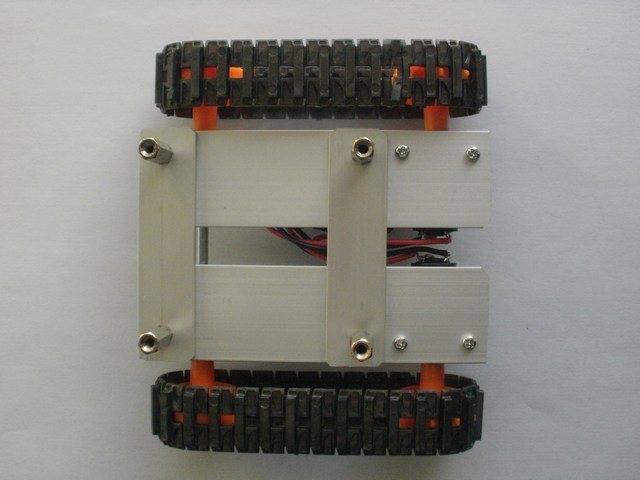
A questo punto delle fasi costruzione telaio robot si potranno montare sulle ruote i due cingoli in gomma [12] che saranno prelevati dal kit, nel nostro caso si utilizzeranno due spezzoni da 30 maglie; per il montaggio consiglio di installare prima sulla ruota del motore e poi su quella folle, cercando di non sforzare molto.
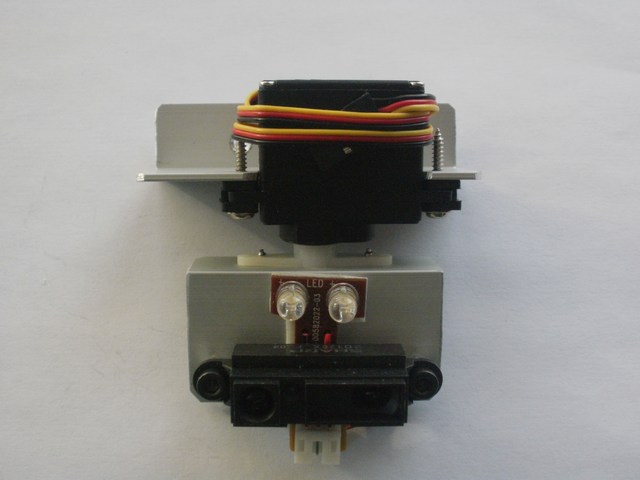
Montaggio faro anteriore

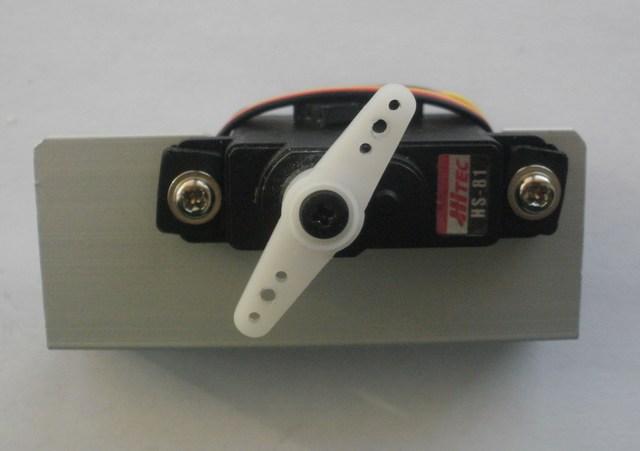
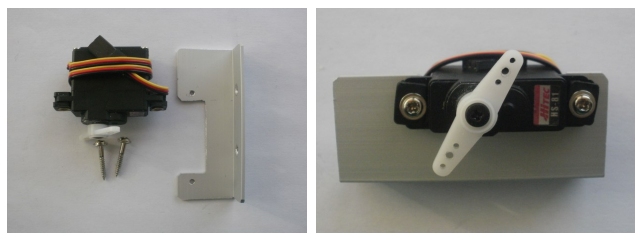 Si passerà quindi al montaggio della parte frontale, montando il servomotore sulla staffa [4] utilizzando i gommini e le viti forniti con il servo [13], si dovrà poi installare sul servo l’apposita staffa in plastica utilizzando anche in questo caso la vite fornita nel kit.
Si passerà quindi al montaggio della parte frontale, montando il servomotore sulla staffa [4] utilizzando i gommini e le viti forniti con il servo [13], si dovrà poi installare sul servo l’apposita staffa in plastica utilizzando anche in questo caso la vite fornita nel kit.
Nel fissaggio controllate che la staffa permetta la rotazione del servomotore con la giusta escursione.
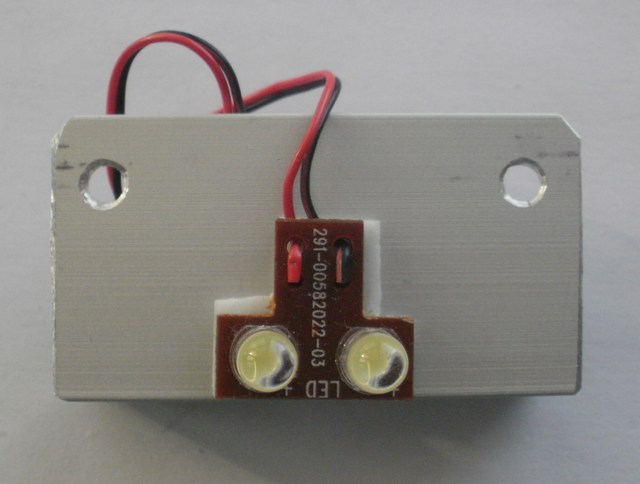
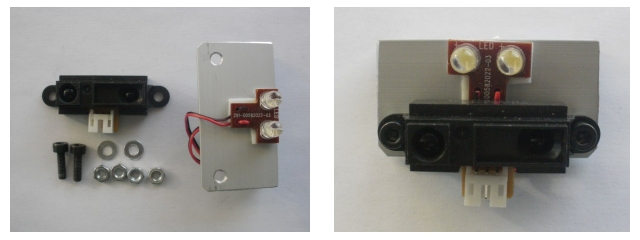 Sulla staffa [5], si dovrà fissare il circuito del faro frontale, utilizzando del nastro biadesivo del tipo formato da due facce adesive con interposto nastro in PVC espanso comprimibile. Ideale per fissaggio di superfici irregolari.
Sulla staffa [5], si dovrà fissare il circuito del faro frontale, utilizzando del nastro biadesivo del tipo formato da due facce adesive con interposto nastro in PVC espanso comprimibile. Ideale per fissaggio di superfici irregolari.
 Per il fissaggio del tutto si utilizzerà la staffa [3], mediante la vite più esterna della staffa di fissaggio del motore.
Per il fissaggio del tutto si utilizzerà la staffa [3], mediante la vite più esterna della staffa di fissaggio del motore.
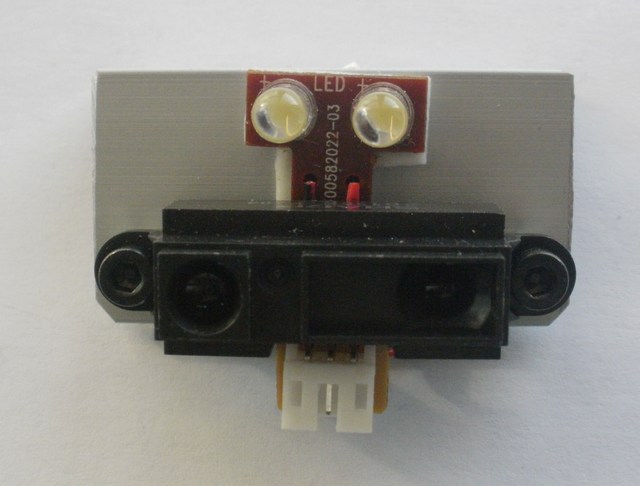
Mentre per il fissaggio del sensore di distanza si utilizzeranno due viti M3x8 con relativi dadi, alcuni dei quali fungeranno da distanziale.




Articoli pubblicati sul web che parlano del robot
In questa pagina sono riportati le riviste e gli articoli che trattano della costruzione e uso del robot LittleBot
Costruzione del robot

Dopo aver costruito la scheda di controllo del robot LittleBot, passiamo alla costruzione del telaio: verrà realizzato con profilati in alluminio e su di esso sarà montato il gruppo motore che è formato da due piccoli moto riduttori che muovono a loro volta una coppia di cingoli.
Sul telaio trovano posto: la batteria di alimentazione, la scheda di controllo e un gruppo frontale formato da un servomotore (che aziona il sensore di distanza) e il faro già analizzato nel precedente articolo.
Una volta assemblato il tutto e collegata la scheda di controllo, potremo effettuare le prime prove di funzionamento.
In questa fase si utilizzerà una semplice applicazione per smartphone in attesa di utilizzare la scheda Arduino Esplora che analizzeremo nel prossimo articolo.
