
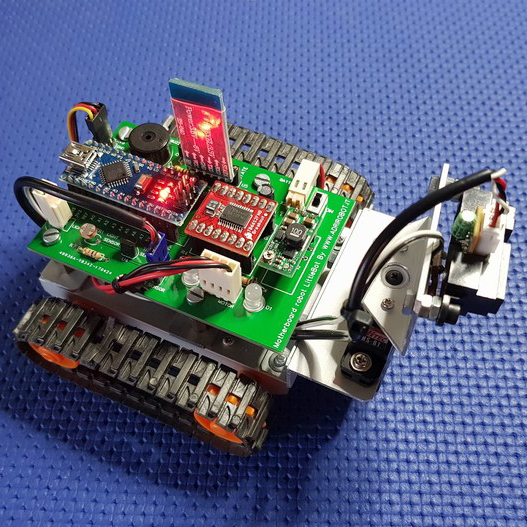
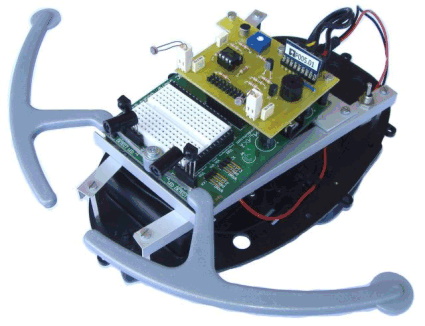
Dopo aver costruito la scheda di controllo del robot Little Bot, passiamo ora ad analizzare le fasi di costruzione del telaio del robot.

Categoria: Robot autocostruiti
Categoria dedicata a robot autocostruiti.
LittleBOT – Fasi di montaggio del telaio robot
LittleBOT – App per il controllo robot
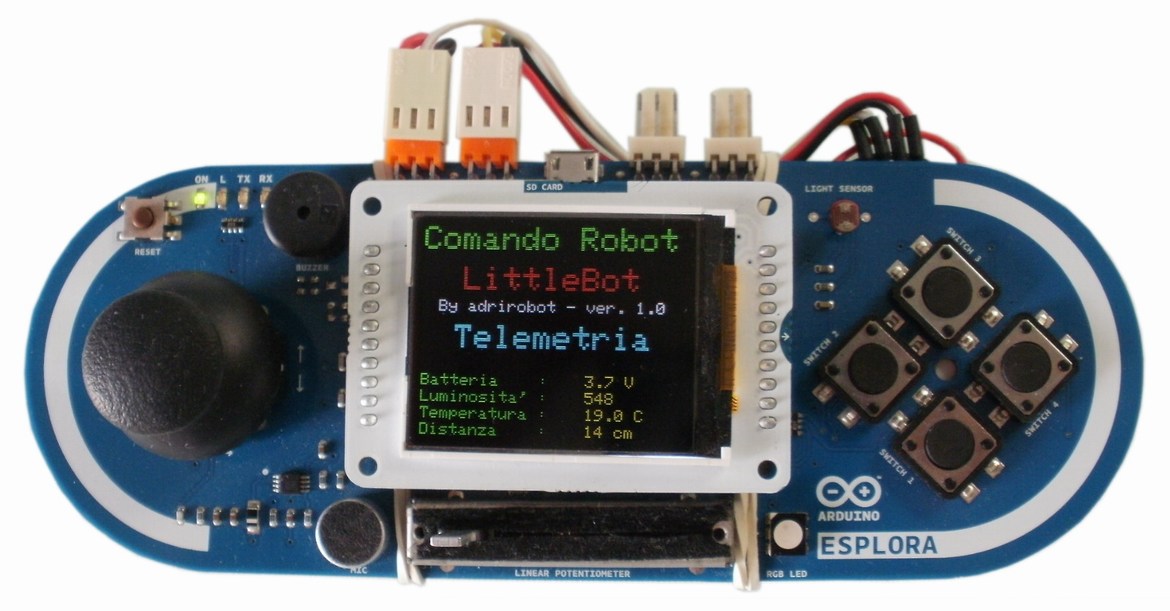
Nella prima versione della stazione di comando del robot LittleBOT questo era stata realizzata con l’utilizzo di una scheda Arduino Esplora.
Con la disponibilità degli smartphone e soprattutto di specifiche APP di controllo del robot ha portato alla possibilità di creare una speciale interfaccia di comando.
Come visibile sotto l’interfaccia permette sia il completo comando del robot sia la lettura dei dati di telemetria forniti dai sensori presenti sul robot.

LittleBOT – Stazione di controllo del robot
In precedenti articoli abbiamo descritto il robot Little BOT, con le sue caratteristiche. La prima versione del robot prevedeva il controllo tramite dei componenti montati sulla scheda di controllo rappresentata dalla ESPLORA. La stazione di controllo di Little BOT è formata dai seguenti componenti:
-
Scheda Arduino esplora con display TFT
-
Batteria Li-ion
-
Scheda caricabatteria/alimentazione con Batteria Li-ion
-
Cavi di collegamento
-
Modulo Bluetooth BlueSMiRF Silver
La diffusione degli smartphone ha portato alla possibilità di utilizzare quest’ultimo come dispositivo di comando. Vediamo come.
LittleBOT – Scheda controllo robot – Progetto completo
Abbiamo visto nel precedente articolo LittleBOT – Progetto per un robot cingolato le caratteristiche del robot ed abbiamo detto che il controllo era demandato ai componenti montati sulla scheda di controllo.
In questo articolo faremo l’ analisi della scheda di controllo del robot con la descrizione di tutti i suoi componenti.
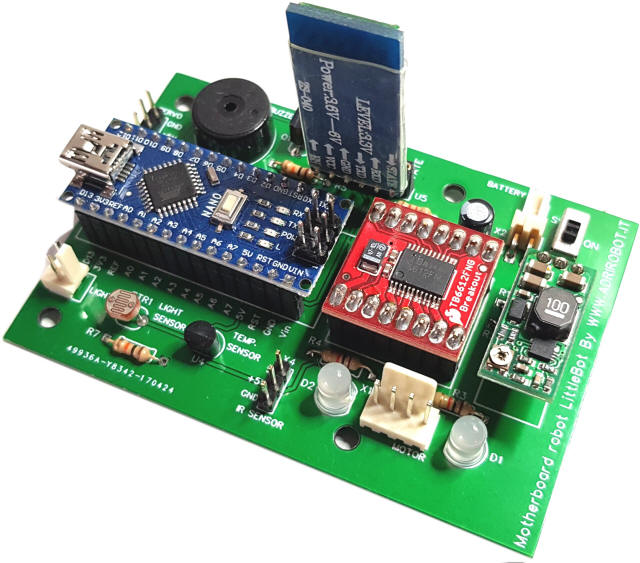
Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
| Sito online per creazioni schemi e PCB | Sito produzione PCB |
LittleBOT – Progetto per un robot cingolato
In questo articolo e in altri presenti sul sito vedremo il progetto completo per la costruzione di un robot cingolato: Little BOT. Si tratta di un piccolo robot dotato di una scheda di controllo su cui è installato un Arduino Nano. Il telaio è realizzato in alluminio ed è mosso da due moto riduttori realizzati completamente in metallo che muovono una coppia di cingoli.
Altri progetti di robot si possono trovare nell’articolo Progetti completi di robot autocostruiti da adrirobot
BLE Robot board – Progetto completo
Su questo sito è già presente una scheda per controllo robot LittleBOT – Scheda controllo.
La BLE Robot board è la sua versione ridotta, di piccole dimensioni (6×6 cm), permette comunque di pilotare piccoli robot.
 Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
| Sito online per creazioni schemi e PCB | Sito produzione PCB |
Progetti completi di robot autocostruiti da adrirobot
Vi presenterò tredici progetti completi di robot autocostruiti realizzati da me. Ognuno sarà brevemente descritto nelle sue caratteristiche principali e si farà riferimento ai link che vi permetteranno di leggere gli articoli completi.
Molti degli articoli sui progetti completi di robot autocostruiti a cui faccio riferimento sono stati pubblicati dalla rivista Fare Elettronica e sul Blog Elettronica Open Source.
BUG – Progetto di un robot con DeA Basic Stamp
In questo articolo viene presentata la costruzione del robot BUG uno dei tanti da me costruiti, gli altri li potete trovare elencati nell’articolo Progetti completi di robot autocostruiti da adrirobot.
Il robot deve il suo nome alla vaga rassomiglianza con un insetto dotato dalle sue “antenne”. Per l’assemblaggio del robot si è ricorso ai componenti derivati dalle opere a fascicoli “COSTRUISCI E PROGRAMMA IL TUO ROBOT” con cui si assemblava il robot Panettone da cui si si è ricavata la DeA Basic Stamp come scheda di controllo.
Il telaio è invece stato ricavato dall’opera “Ultimate Real Robot” con cui si costruiva il robot Cybot (telaio e gruppo motoriduttori) entrambe le opere edite dalla DeAgostini.
Nel montaggio sono previste due configurazioni.
ArduinoBOT Progetto completo del robot
Vediamo in questo articolo il progetto completo del robot ArduinoBOT. Il robot di tipo esploratore è basato sulla Scheda di controllo Arduino UNO, per muoversi utilizza due ruote in ABS azionate da due motoriduttori che sono comandati (nel primo prototipo) da una scheda che utilizza L293 auto costruita , mentre nella versione definitiva da una scheda motor shield.

Parliamo di robotica, live con Adrirobot
Lo scorso 9 maggio si è tenuta la MicroCon 2020 – La Mini Conferenza Elettronica su YouTube.
In quella serata si è parlato di elettronica, microcontrollori e tecnologia con la presenza di 15 ospiti: i loro nomi li trovate nell’articolo Vediamo chi c’era alla MicroCon 2020.
Sull’onda del successo avuto, si è pensato di programmare nuovi appuntamenti.
Il primo si è svolto la sera dell’ 11 giugno a partire dalle ore 21:00, nel corso della serata che ha visto oltre alla mia partecipazione anche quella degli organizzatori dell’iniziativa Pier Aisa e Paolo Alivertil.
nel corso della serata si è parlato di robotica, dando alcune informazioni di come realizzarli.
L’incontro previsto all’inizio della durata di un’ora è continuato poi per oltre 2 ore, seguito da tanti appassionati.
Durante la diretta sono state illustrate delle slide, chi le volesse avere può scaricarle da questo link.
Per chi si fosse perso la diretta o volesse rivederla ecco il filmato integrale.

Sono già stati programmati altri incontri serali della serie MicroCon Mini Conferenza Elettronica con tecnici, specialisti ed esperti in campo elettronico.
Al momento sono in programma i seguenti appuntamenti:
- 18 giugno – giovedì – ore 21:00 – Mauro Alfieri – Ingegnerizzazione di prototipi con Arduino.
- 25 giugno – giovedì – ore 21:00 – Leonardo Righini – Nuova Elettronica.
Per altre date e aggiornamenti visitate il sito Microcon e in particolare la pagina appuntamenti.
PCB a partire da 2$ per 5 pezzi
