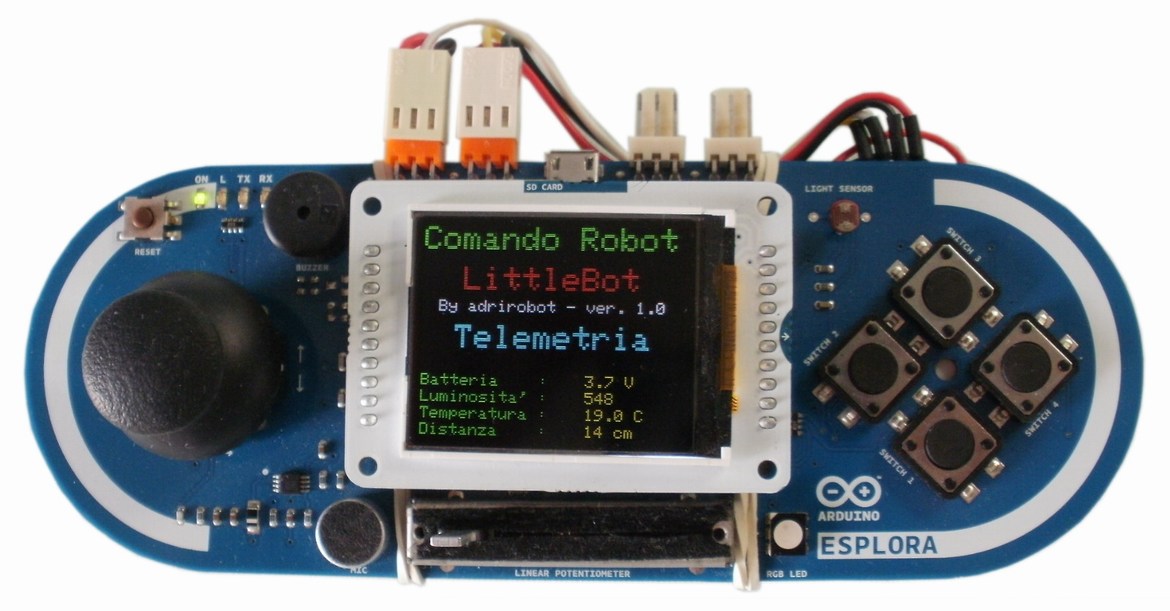
In precedenti articoli abbiamo descritto il robot Little BOT, con le sue caratteristiche. La prima versione del robot prevedeva il controllo tramite dei componenti montati sulla scheda di controllo rappresentata dalla ESPLORA. La stazione di controllo di Little BOT è formata dai seguenti componenti:
-
Scheda Arduino esplora con display TFT
-
Batteria Li-ion
-
Scheda caricabatteria/alimentazione con Batteria Li-ion
-
Cavi di collegamento
-
Modulo Bluetooth BlueSMiRF Silver
La diffusione degli smartphone ha portato alla possibilità di utilizzare quest’ultimo come dispositivo di comando. Vediamo come.
Continua a leggere

 Citazione dell’articolo nelle sezioni ARDUINO, ARTICOLI, PROGETTI del blog di Elettronica In
Citazione dell’articolo nelle sezioni ARDUINO, ARTICOLI, PROGETTI del blog di Elettronica In