


Allegati al Fascicolo n°1 e Fascicolo n°45 dell’opera “STAR WARS: Costruisci il tuo R2-D2” troviamo i due moduli indicatore stato R2-D2.
Entrambi sono montati nella cupola, uno frontale emette colori: Rosso, Blu, e Viola (accensione contemporanea delle due serie di led). Mentre il posteriore emette luce Gialla e Verde.


Indice
Descrizione
Il primo modulo indicatore di stato (siglato come DF-35) è allegato al Fascicolo n°1 è formato da un piccolo PCB su cui sono presenti 7 led Rossi e 7 Led Blu.
Il secondo modulo indicatore di stato (siglato DF-53) allegato al Fascicolo n°45 è del tutto simile al primo, cambiano solo i colori del led che in questo caso sono 7 led Gialli e 7 Led Verdi.
 Fascicolo n° 1 |
 Fascicolo n° 45 |

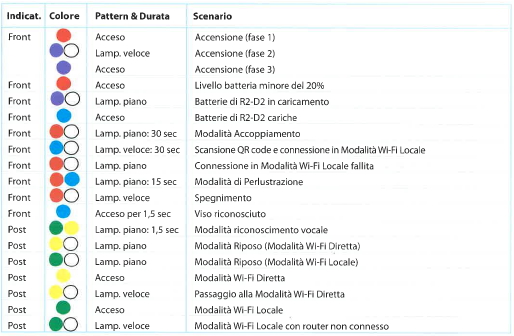
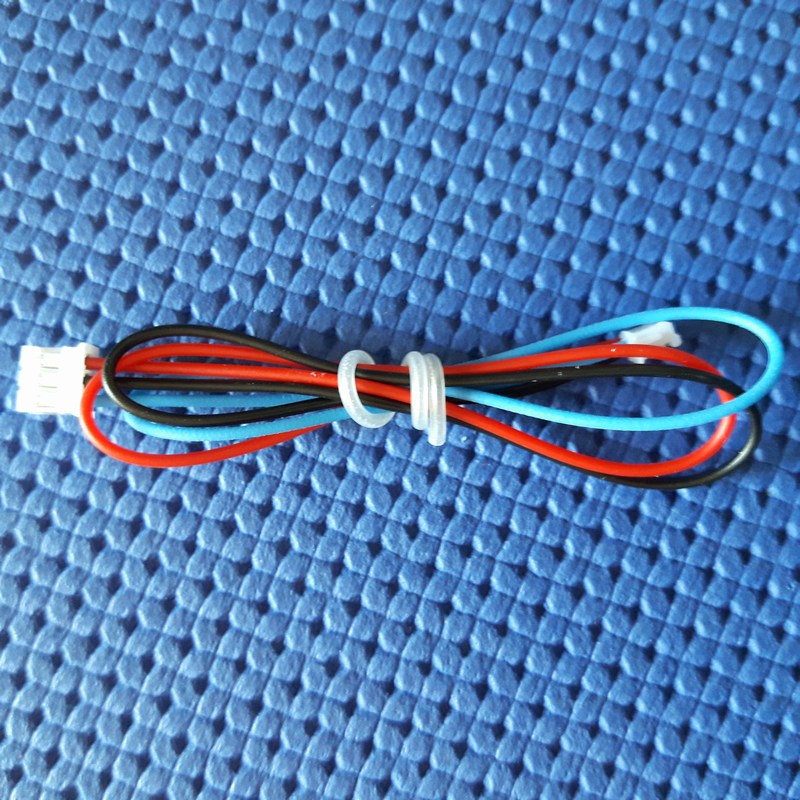
Questi si accendono in relazione al compito che il droide sta svolgendo, nella tabella il significato dei colori e della velocità di lampeggio.
Vedere anche articolo Star Wars R2-D2 – Piano dell’opera.

Foto del modulo e cavo di collegamento
Vista frontale del modulo, sono visibili i led e le resistenze limitatrici
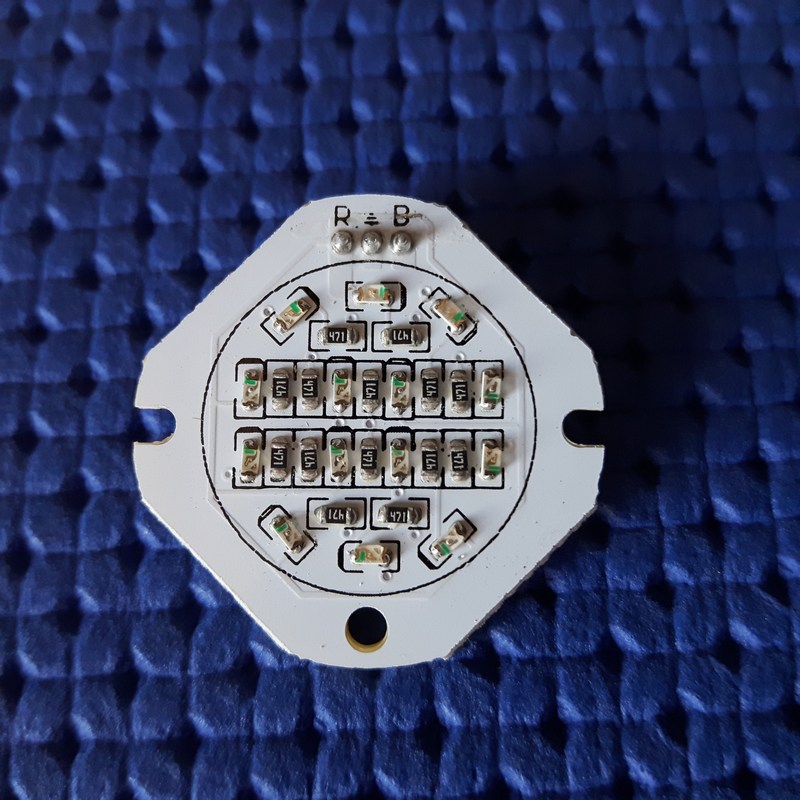
Vista posteriore del modulo, è visibile in connettore maschio per il collegamento
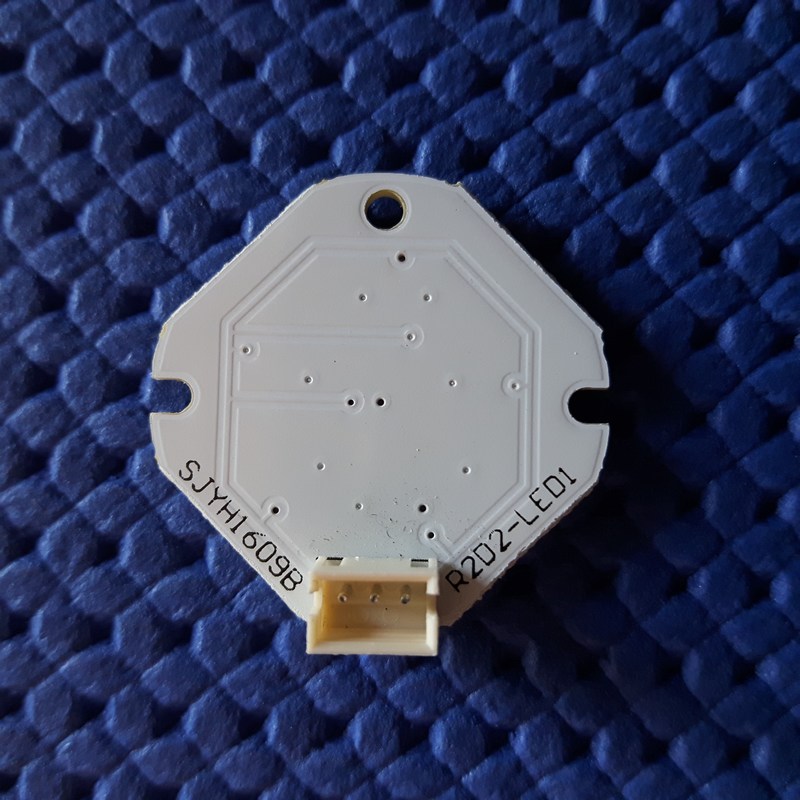
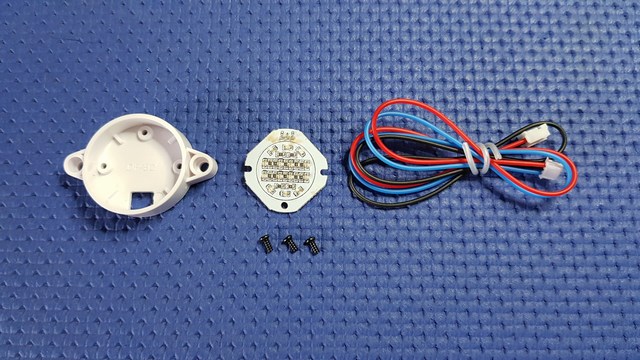
Cavo di collegamento, sono presenti tre cavi: alimentazione led rossi, led blu, cavo di massa. I cavi sono collegati a due connettori femmina, uno più piccolo da inserire nel modulo e l’altro più grande che sarà da inserire nelle scheda di controllo.

Fasi di montaggio
Seguono le fasi di montaggio del primo indicatore stato del robot R2-D2.

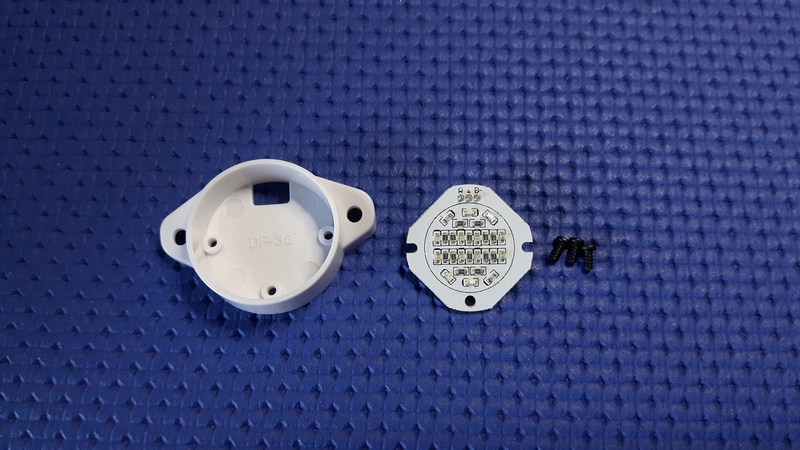
Supporto (DF-26), Scheda led (DF-35), 3 viti nere 2x4mm di fissaggio.
Fissare la scheda avvitando le viti, senza stringere troppo.

Inserimento del connettore del cavo
Componenti modulo indicatore di stato posteriore

Test del modulo
Per il test dei moduli indicatore stato di R2-D2, si utilizza la piccola scheda test allegata al fascicolo n° 3 e il porta batterie allegato al fascicolo n°4

Le istruzioni sono riportate all’intento del Fascicolo n°4.



Test del modulo con Arduino Nano
Per chi è appassionato di elettronica potrebbe avere disponibile una scheda della serie Arduino, testare il modulo indicatore di stato si è utilizzato una scheda Arduino Nano su cui è stato caricato un semplice programma che accende i due gruppi di led con una pausa di un secondo.

Arduino Nano V3
Sono utilizzati due pin digitali (D2 e D3) per comandare l’accensione dei led.

| Programma
|
Schema circuito di prova
|




Programma di test
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
/* Test_indicatore_stato_r2-d2.ino Lo sketch testa l'accensione delle due serie di 7 led rossi e blu presenti sul modulo DF-35 Scheda LED dell'indicatore di stat Sono utilizzati i seguenti pin Pin GND -> GND Pin Diditale D2 -> Accensione led blu Pin Diditale D3 -> Accensione led rossi Creato il 13/1/2018 da Adriano Gandolfo Sito web https://www.adrirobot.it Blog http://it.emcelettronica.com/author/adrirobot Pagina Facebook https://www.facebook.com/Adrirobot-318949048122955 Istagram https://www.instagram.com/adrirobot/ This example code is in the public domain. */ int led_blu = 2; //Pin a cui sono collegati i led blu int led_rosso = 3; //Pin a cui sono collegati i led rossi void setup() { // initializza i pin digital come output. pinMode(led_blu, OUTPUT); pinMode(led_rosso, OUTPUT); } void loop() { digitalWrite(led_blu, HIGH); // accende i led blu delay(1000); // attesa di un secondo digitalWrite(led_blu, LOW); // spegne i led blu delay(1000); // attesa di un secondo digitalWrite(led_rosso, HIGH); // accende i led rossi delay(1000); // attesa di un secondo digitalWrite(led_rosso, LOW); // spegne i led rossi delay(1000); // attesa di un secondo } |
Montaggio all’interno del robot
I due indicatori di stato sono montati all’interno della cupola, uno frontalmente Rosso/blu) e uno nella parte posteriore.
I connettore dei cavi sono poi collegati alla scheda DF103 Scheda di elettronica di collegamento, ai connettori G Y, e R B.

allegata al fascicolo n° 66. Le istruzioni di montaggio si trovano nei fascicoli n° 64, 65 e 77.
 Fascicolo n° 66 |
 Fascicolo n° 65 |
 Fascicolo n° 77 |




 Video del test dei moduli
Video del test dei moduli