

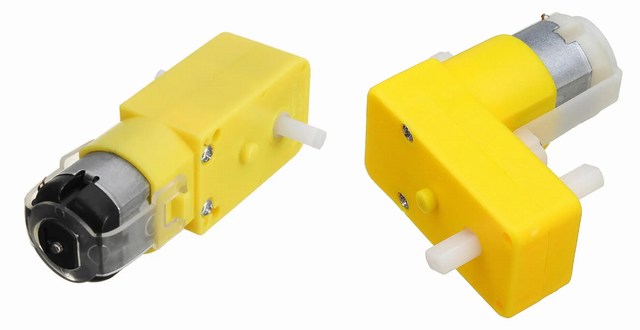
I motoriduttori con corpo in plastica presentati in questo articolo sono basati sul disegno originale di Mark Tilden per l’uso nel BIOBugs & Robosapien e hanno avuto rispetto a quest’ultimi, una varietà di miglioramenti come alberi di uscita doppia e un motore a più basso consumo di corrente. Esistono sia con asse d’uscita perpendicolare al motore che parallelo.

Indice
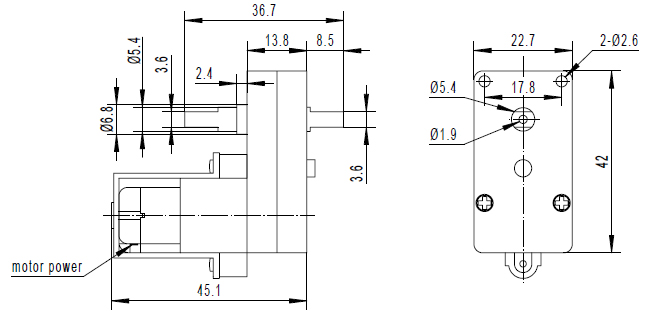
Motoriduttore con asse motore parallelo all’ asse uscita
Vediamo le caratteristiche tipiche di questo motoriduttori con corpo in plastica in cui l’asse del motore è parallelo all’asse di uscita.
Per il dimensionamento dei motoriduttori vedere l’articolo Come dimensionare un motoriduttore per robot

Caratteristiche Elettriche:
- Tensione di funzionamento: 3 ~ 7.5V (6V nominale);
- Corrente a vuoto : 140 mA (3V) – 170 mA (6V);
- Velocità a vuoto (3V): 90 rpm (3V) – 160 rpm (6V);
- Max. Coppia di uscita: 0.8 kgf.cm;
- Max. corrente di Stallo: 2,8 A.
Caratteristiche meccaniche:
- Modalità uscita: 2 lati;
- Rapporto di trasmissione: 1:120;
- Max. Diametro Asse di uscita: 5,4 millimetri;
- Peso netto: 45 g
NOTA: Per ridurre le interferenze con la circuiteria elettronica causate dallo scintillio dovuto allo sfregamento delle spazzole del motore elettrico sul collettore, è consigliabile saldare tre condensatori ceramici (o meglio multistrato) da 100nF uno tra positivo e carcassa, uno tra negativo e carcassa e uno tra positivo e negativo. Nella Figura è visibile lo schema di collegamento dei condensatori utilizzati come filtri antidisturbo.


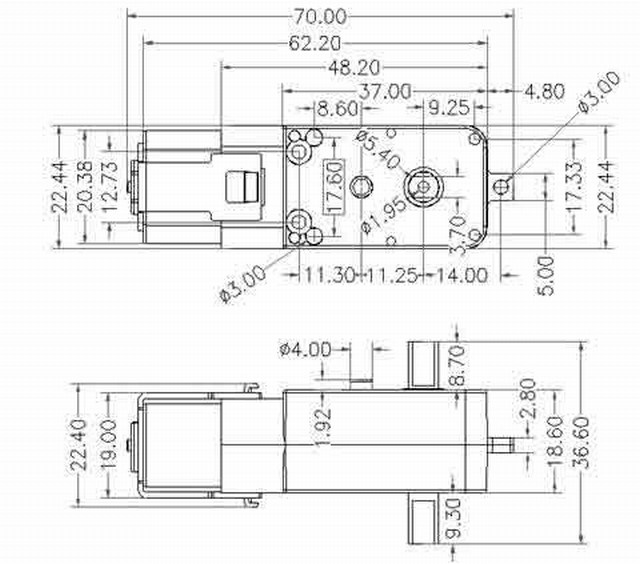
Motoriduttore con asse motore perpendicolare ad asse uscita
Questo modello di motoriduttori con corpo in plastica a differenza del precedente, presenta l’asse del motore perpendicolare all’asse di uscita.

Notate che il treno di ingranaggi interno è realizzato con ingranaggi in plastica. Questo vale anche per il modello con asse in uscita parallelo al motore.
 Caratteristiche Elettriche:
Caratteristiche Elettriche:
- Tensione di funzionamento: 3 ~ 6V;
- Corrente continua a vuoto Corrente (3V): 150 mA +/- 10%
- Min. Velocità operativa (3V): 90 +/- 10% RPM
- Min. Velocità operativa (6 V): 200 +/- 10% RPM
- Coppia: 0,15 Nm ~ 0,60 Nm
- Coppia di stallo (6 V): 0,8 kg.cm
- Rapporto di trasmissione: 1:48
Caratteristiche meccaniche:
- Modalità uscita: 2 lati;
- Dimensioni del corpo: 70 x 22 x 18 mm
- Max. Diametro Asse di uscita: 5,4 millimetri;
- Peso netto: 30,6 g
Esempio di utilizzo del motoriduttore
Questo motoriduttore è presente il molti kit di basi per robotica, a tal proposito vedere l’articolo Kit per basi robotiche commerciali.
Un esempio di utilizzo di questa tipologia è la costruzione della Smart Robot Car Kit V3.0 da ELEGOO

Altro utilizzo nel kit Kit base per robot Magician chassis, usato come base per la costruzione del robot MagicBot .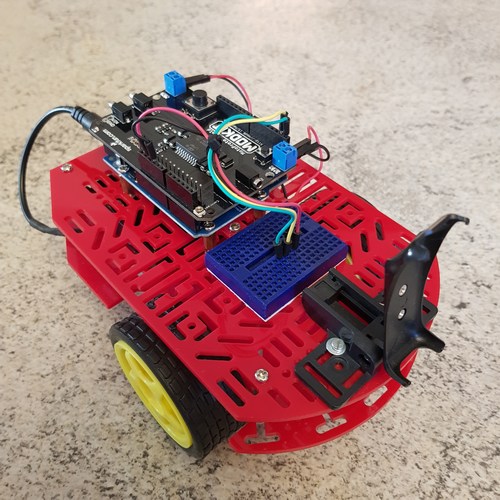
Il tipo di motoriduttore è inoltre utilizzato nel telaio Turtle – 2WD Mobile Platform kit per robot sottilizzato per la costruzione di RoboYun

Ruote per motoriduttore
Per questa tipologia di motoriduttori sono disponibili delle ruote che si possono calettare direttamente sul mozzo del motoriduttore che presenta un lato piatto per trasmettere il moto.
Il fissaggio avviene tramite una vite autofilettante


Come pilotare il motore
Per pilotare questo motoriduttore si potrà scegliere il modello tra quelli mostrati nell’articolo Moduli e shield controllo motori per Arduino . Per esempio il modulo controllo motore è basato sull’integrato L298N

