Su questo sito è già presente una scheda per controllo robot LittleBOT – Scheda controllo.
La BLE Robot board è la sua versione ridotta, di piccole dimensioni (6×6 cm), permette comunque di pilotare piccoli robot.
 Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
Il PCB è stato progettato con il programma online EasyEDA, mentre stata realizzata tramite il servizio offerto dal sito JLCPCB.
| Sito online per creazioni schemi e PCB | Sito produzione PCB |
Indice
Descrizione
La BLE Robot board ha le dimensioni di 6×6 cm, su essa sono presenti:
- Modulo elevatore tipo MP1584
-
Controller con Arduino Nano o NANO-BLE
-
Buzzer
- Pin strip a 3 pin per possibile collegamento di sensori o altri moduli
- Pin strip a 4 pin per accesso interfaccia I2C
Genesi del progetto
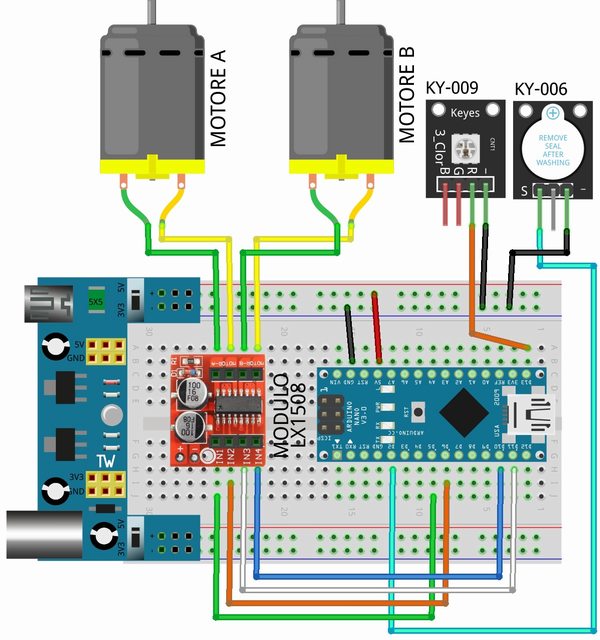
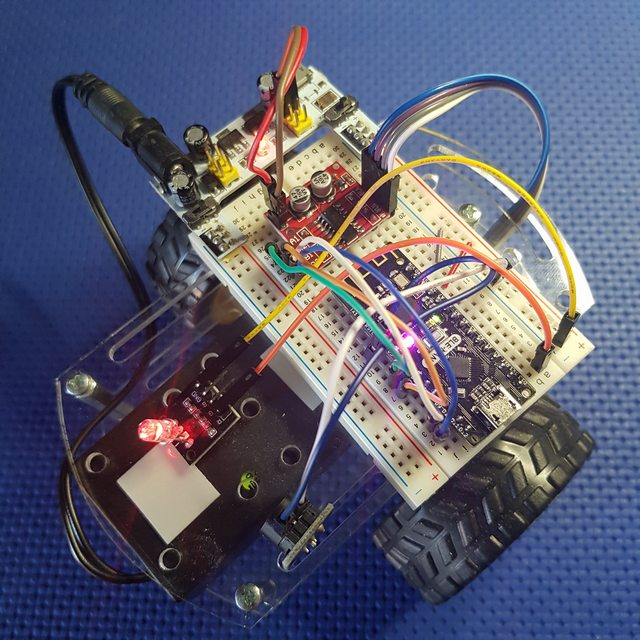
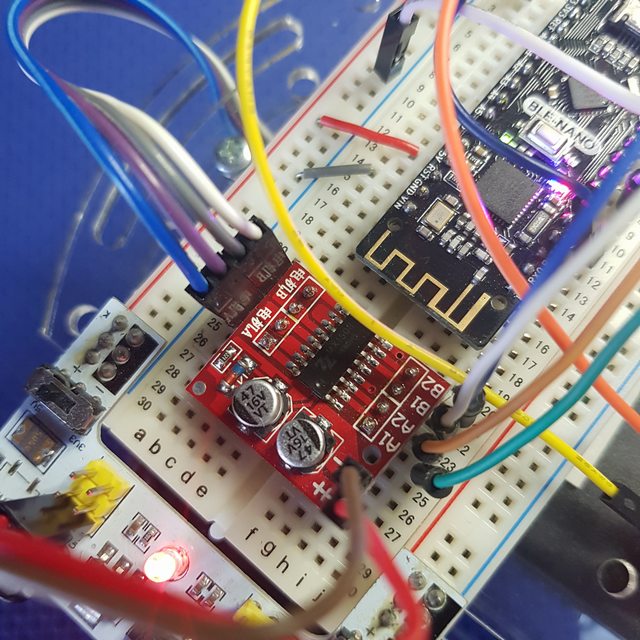
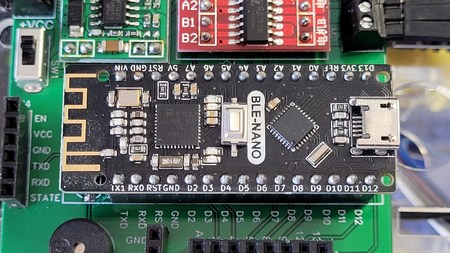
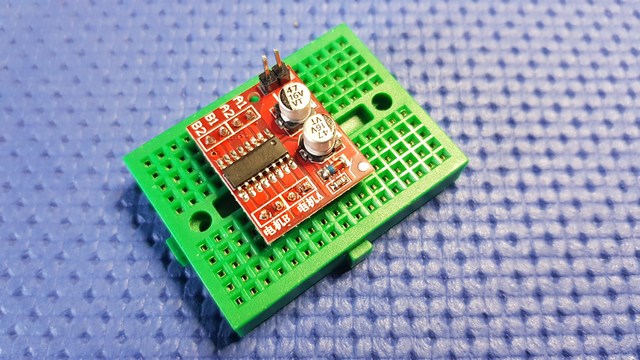
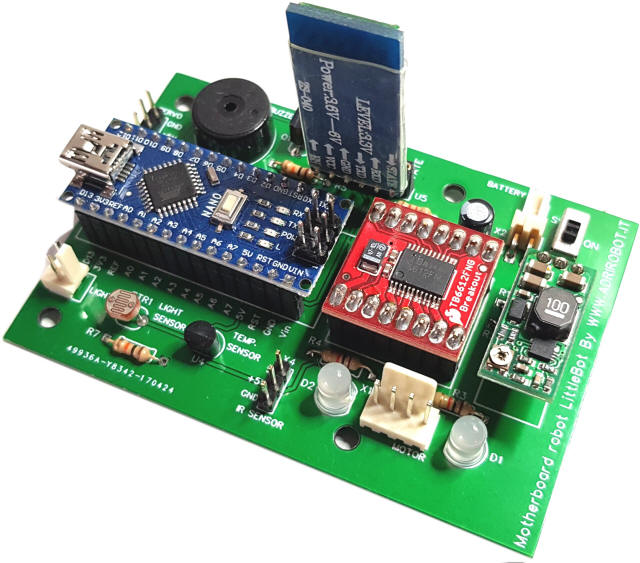
Prima di procedere alla stesura del progetto si è realizzato un prototipo per testare il componenti principali, quali la scheda BLE-NANO e la schedina controllo motori. Sotto lo schema utilizzato e alcune foto del prototipo.
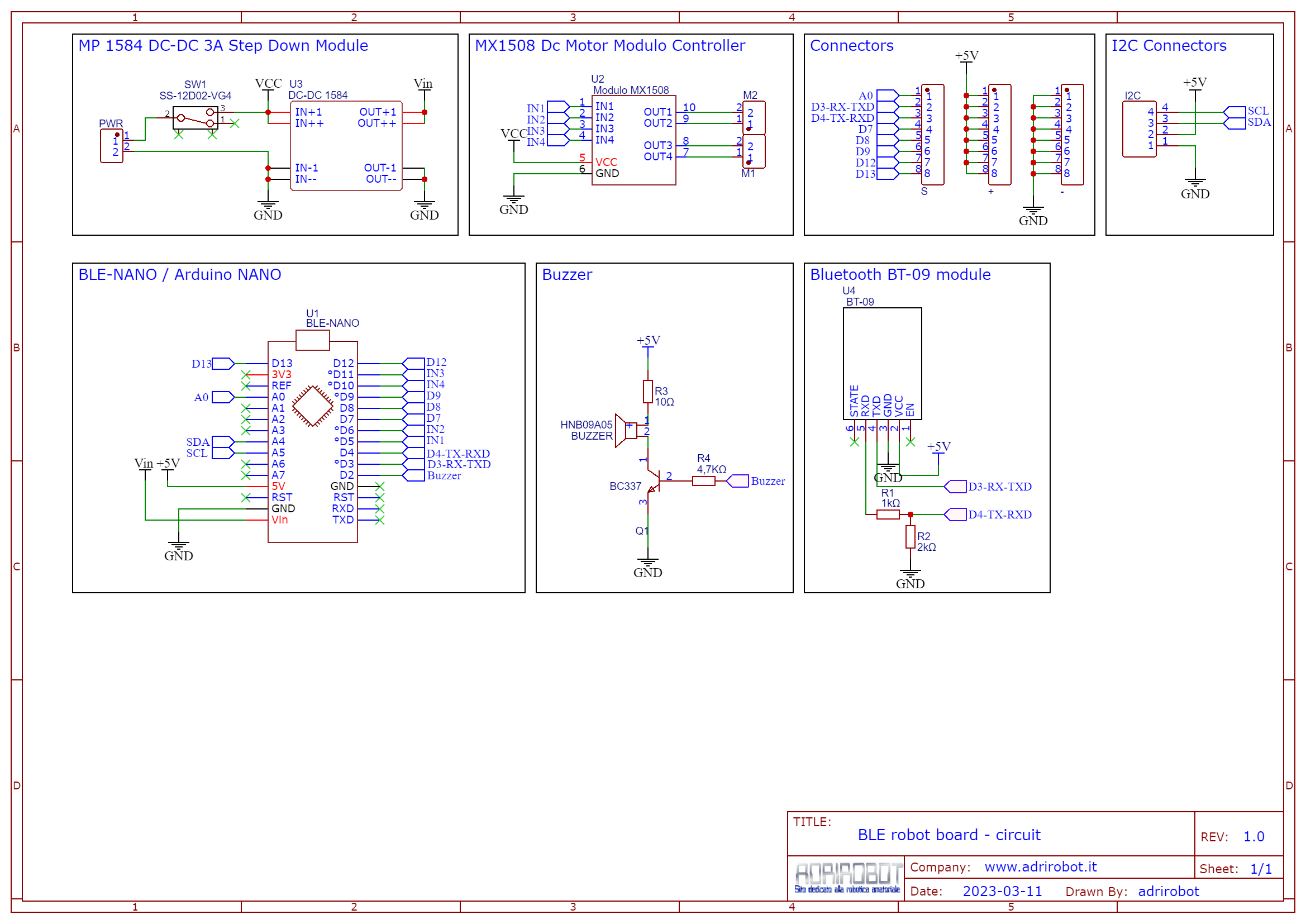
Schema elettrico della BLE Robot board
L’analisi della BLE Robot board inizia esaminando lo schema totale della scheda di controllo.
Sotto sono poi riportati i singoli schemi descritti nelle singole sezioni.
Schema della scheda in formato PDF
Il progetto completo può essere scaricato dal mio account presso OSHWLab, utilizzando questo link

Lo schema e il relativo PCB sono stati realizzati con il programma EasyEDA: un servizio per il disegno di circuiti e la loro simulazione, progettazione e produzione di PCB. Provatelo è gratuito!
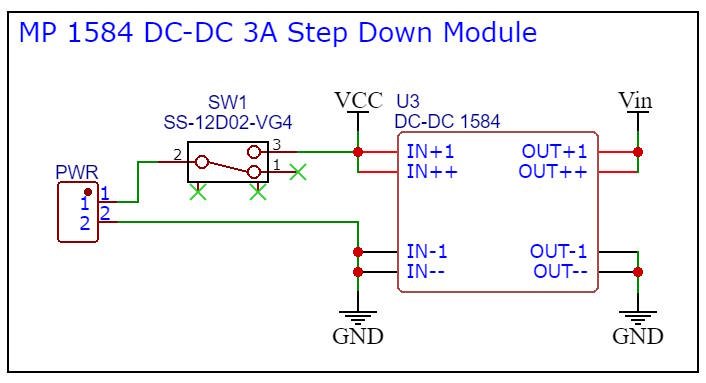
Sezione di alimentazione
Sulla scheda di controllo, la tensione di alimentazione della parte elettronica è derivata da un convertitore DC/DC di tipo step-down. Il convertitore DC/DC scelto è il modello MP1584 Step-Down Converter.
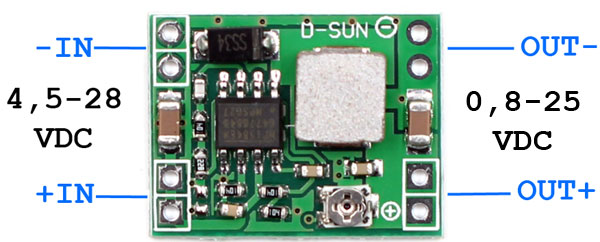
Il circuito si basa sul chip MP1584 Step-Down Converter 3A, 1.5MHz, 28V prodotto dalla Monolithic Power Systems.
L’integrato è posizionato su un PCB dalle dimensioni particolarmente ridotte (22,3x17x4,4 mm). Il circuito è in grado di convertire una tensione continua (in ingresso) compresa tra 4,5 e 28 volt in una tensione di uscita (regolabile) compresa tra 0,8 a 25 volt. La massima corrente disponibile è di circa 3 A.
IN+ = tensione di ingresso
IN- = GND
OUT+ = tensione di uscita
OUT- = GND. Collegato al modulo IN-on
Specifiche tecniche
- Tensione di ingresso: da 4,5 VDC a 28 VDC
- Tensione di uscita: regolabile da 0,8 a 25 VDC
- Corrente massima: 3 A – consigliata 1,5A
- Efficienza: 96%
- Dimensioni (mm): 22,3x17x4,4
Per ulteriori dettagli vedere l’articolo Modulo MP1584 Step-Down Converter
Dove trovare il modulo
Il Modulo DC-DC Step-Down regolabile 4,5-28 volt 3A può essere acquistato presso il sito FUTURA ELETTRONICA il codice prodotto è 3085-MP1584ADJ.
Versione del modulo DC-DC Step-Down con tensione di uscita fissa a 5V , costo 2,50€ , codice prodotto 3085-MP1584ENDCDC
![]()
Il modulo è disponibile anche presso il sito Homotix, il codice è HMT1584
![]()
La tensione VCC, in arrivo dal pacco batterie, è formato da due stilo batterie ricaricabili agli ioni di litio (Li-ion) tipo 18650, da installare di un portabatterie, che sarà posizionato nel telaio del robot.


Sezione Processore
La mente di tutto il robot è rappresentata da un Arduino Nano o meglio un BLE-NANO.
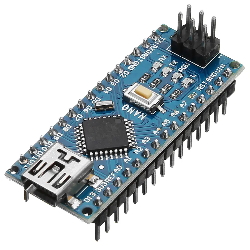 |
 |
Specifiche tecniche del la scheda BLE-NANO:
| Chip BLE: | TI CC2540 |
| Canale di lavoro: | 2.4 GHz |
| Distanza di trasmissione: | 10 m |
| Caratteristiche: | Supporta la direttiva AT per configurare BLE Porta seriale virtuale USB, porta seriale hardware, trasmissione trasparente a tre vie BLE Supporta switch master e slave, invio di oltre 20 byte. |
| MCU: | ATmega328P-MU QFN32 |
| Architettura | AVR |
| Tensione di funzionamento | 5 V |
| Pin I / O digitale | 22 pins (di cui 6 PWM) |
| Pin Ingresso analogico | 8 pins |
| Corrente continua per I / O | 20 mA |
| Flash Memory | 32 kB di cui 2 KB utilizzati dal bootloader |
| SRAM | 2 kB |
| EEPROM | 1 KB |
| Velocità di clock | 16 MHz |
| Porta UART | RX/TX |
| Porta I2C | A4 (SDA), A5 (SCL) |
| Porta SPI | D11 (MOSI), D12 (MISO), D13 (SCK). Qualsiasi GPIO per Chip Select (CS). |
| Bootloader : | Il più recente Arduino 1.8.8 |
| LED integrati | 4 - USB connessa, USB/bluetooth/UART data led, Bluetooth status, Power |
| Connettore USB | Micro-USB |
| Alimetazione | USB, Vin 6 ~ 12V 5V |
| Consumo di energia | 19 mA |
| Dimensioni | 48 x 19 x 12 mm |
| Peso | 18 g |
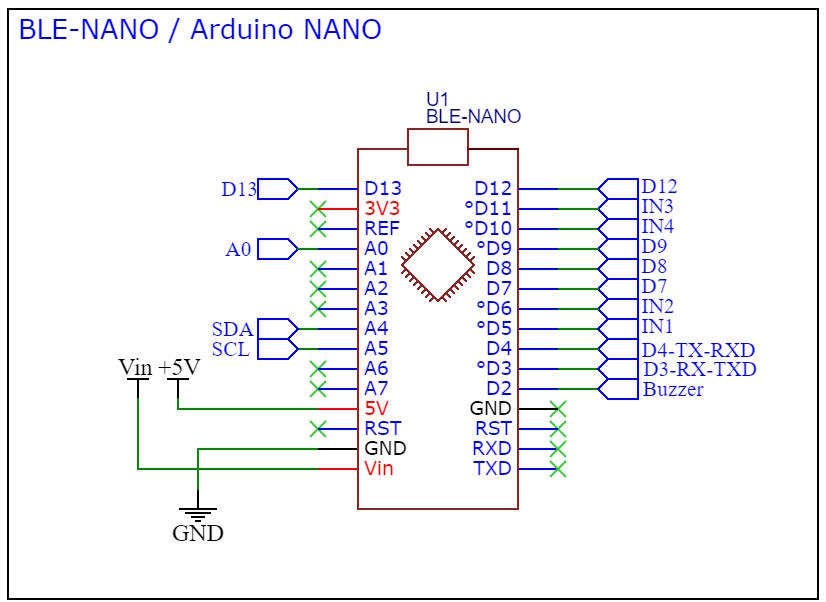
Alle porte I/O digitali e A/D della scheda di controllo sono connessi: il buzzer, il modulo motore, le pin strip per sensori esterni, il connettore I2C, secondo questa tabella.
| Pin | Funzione |
|---|---|
| Pin Digitale 2 | Buzzer |
| Pin Digitale 3 | Connettore / rx-txd bluetooth |
| Pin Digitale 4 | Connettore / tx-rxd bluetooth |
| Pin Digitale 5 | IN1 Modulo MX1508 |
| Pin Digitale 6 | IN2 Modulo MX1508 |
| Pin Digitale 7 | Connettore |
| Pin Digitale 8 | Connettore |
| Pin Digitale 9 | Connettore |
| Pin Digitale 10 | IN4 Modulo MX1508 |
| Pin Digitale 11 | IN3 Modulo MX1508 |
| Pin Digitale 12 | Connettore |
| Pin Digitale 13 | Connettore - Led Arduino |
| Pin Analogico A0 | Connettore |
| Pin Analogico A4 | SDA connettore I2C |
| Pin Analogico A5 | SCL connettore I2C |
Per la programmazione del modulo, sarà utilizzata la Mini-B USB. La presenza della tensione di alimentazione sarà segnalata dall’accensione del led POW , mentre il traffico tramite la linea seriale, sarà monitorata tramite i led TX e RX presenti sulla scheda Arduino Nano.
Modulo controllo motore
Per pilotare i due moto-riduttori del robot si è utilizzato un modulo basato sul chip MX1508.

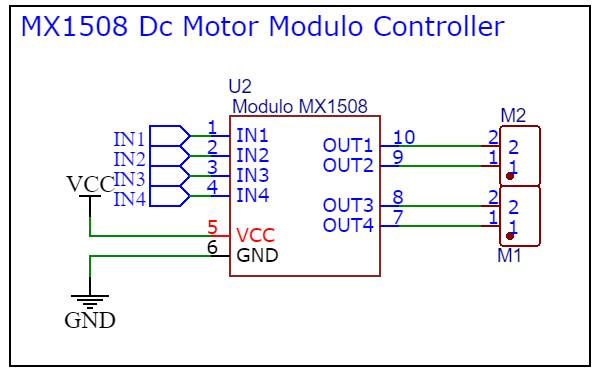 Si tratta di un driver per motori DC a spazzole, al suo interno si trovano due canali H-bridge con MOSFET di potenza a canale N e canale P e può gestire due motori.
Si tratta di un driver per motori DC a spazzole, al suo interno si trovano due canali H-bridge con MOSFET di potenza a canale N e canale P e può gestire due motori.
Il circuito ha un ampio intervallo di tensioni di funzionamento (da 2 V a 9,6 V), la massima corrente di uscita continua raggiunge 0,8 A e la massima corrente di uscita di picco raggiunge 1,5 A.
Il circuito di pilotaggio dispone di protezione da surriscaldamento incorporato. Una volta superato il valore impostato (valore tipico 150 ℃), il circuito interno disattiverà immediatamente la tensione di uscita.
| Tensione di alimentazione del modulo | 2 -9,6 V |
| Tensione di ingresso del segnale: | 1,8-7 V |
| Corrente per singolo canale: | 0,8 A |
| Corrente di funzionamento singola: | 1,5 A |
| Corrente di picco: | fino a 2,5 A |
| Corrente di stand by: | inferiore a 0,1 μA |
| Circuito di protezione surriscaldamento: | incorporato (TSD) con effetto isteresi |
| Dimensione: | 24,7 x 21 x 7 mm |
| Diametro del foro di montaggio: | 2 mm |
Maggiori informazioni nell’articolo Modulo motore MX1508 per Arduino
Sezione Buzzer
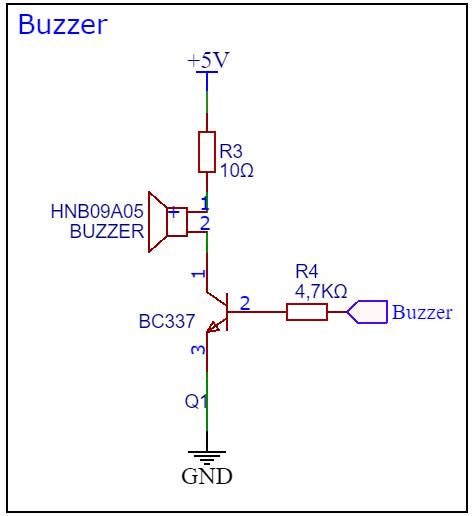
Sulla scheda di controllo è presente un buzzer per l’emissione di segnali acustici. Il Buzzer ( in italiano cicalino), è un dispositivo audio di segnalazione, che può essere di tipo meccanico, elettromeccanico o piezoelettrico.
Quello utilizzato nel progetto è del tipo piezoelettrico e presenta le seguenti caratteristiche:
- Tensione di funzionamento: 5V
- Dimensione: 9×5.5 mm
- Peso: 0.65g

Per non sovraccaricare la porta del processori, il buzzer è pilotato tramite un transistor NPN tipo BC 337, la cui base è alimentata tramite una resistenza di limitazione R6 da 4,7 kΏ; sulla linea di alimentazione del buzzer è inoltre presente un’ulteriore resistenza di limitazione R7 da 10 Ώ.
![]()
Sezione modulo Bluetooth BLE AT-09/HC-05
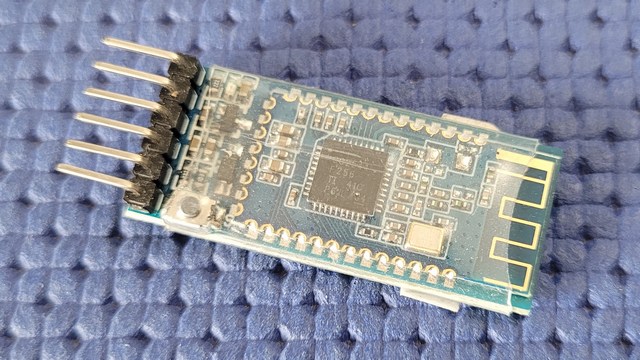
Se viene utilizzato come scheda di controllo una scheda Arduino Nano o suo clone, è disponibile un connettore su cui installare un Modulo Bluetooth BLE tipo AT-09.
 Vedere articolo Bluetooth BLE AT-09 con CC2541
Vedere articolo Bluetooth BLE AT-09 con CC2541
Il connettore U4 permette comunque di collegare un modulo Bluetooth HC-05 che è uno dei moduli più popolari e poco costosi utilizzati per le comunicazioni RF.
Per il collegamento sono utilizzati RX, TX, VCC, GND.
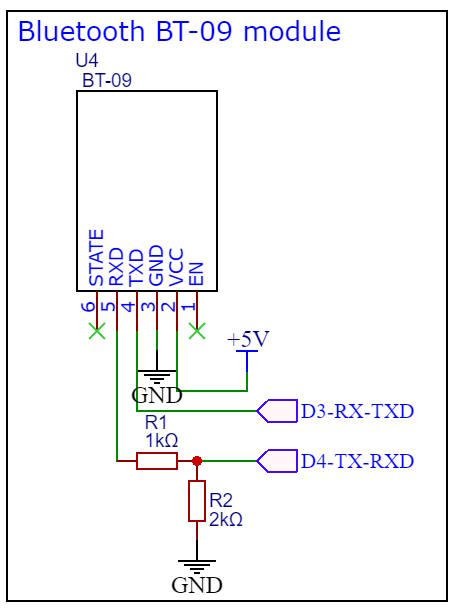
Nel caso il modulo avesse le linee linee dati 3.3V mentre quelle di Arduino sono a 5V, è presente un partitore per ridurre la tensione in ingresso sul pin RX del modulo Bluetooth, mentre questo non sarà necessario sul pin TX.
In teoria si sa che se R1=R2, qualsiasi sia il loro valore, quello che ottiene è un partitore di tensione simmetrico. Applicando in ingresso 10V in uscita si avranno 5V; variando il rapporto tra R1 ed R2 a favore di R1 ( R1 > R2 ) in uscita al partitore di tensione si avrà una tensione di uscita inferiore a Vi/2; variando il rapporto a favore di R2 ( R1 < R2 ) si ottiene una Vo > Vi/2.
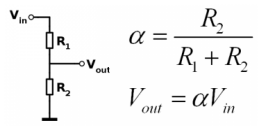
Dato che dobbiamo avere in uscita una tensione inferiore ai 3.3V partendo da una tensione di 5V, si è optato per un valore di R1 pari a 1 kΩ e R2= 2 kΩ, con un rapporto pari a 0,66 il che garantisce un valore della tensione in uscita pari a 3.3V.
Dove trovare il modulo
Il Modulo Bluetooth BLE 4.0 BT-09 può essere acquistato presso il sito Homotix, codice HMTHM10. Ricordo che chi inserirà il mio codice sconto “ADRIROBOT” riceverà uno sconto.
![]()
Altra possibilità è il Modulo Bluetooth 4.0 BLECC2541 con Pin Strip, presso il sito Futura Elettronica, codice 2846-BLECC2541STRIP
![]()
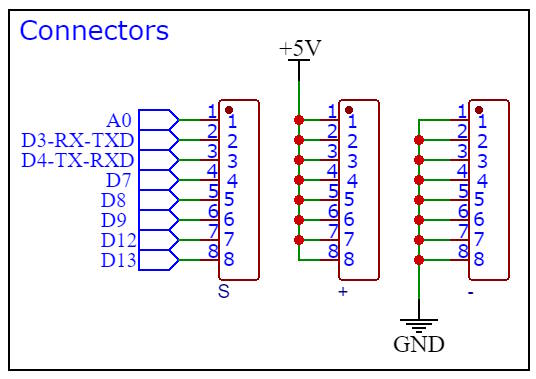
Sezione connettori e I2C
A lato della scheda di controllo sono presenti 8 connettori a tre pin collegati ai pin digitali e uno al pin A0 analogico. E’ inoltre presente un connettore e 4 pin a cui collegare moduli sensore dotati di connettore bus I2C.

Realizzazione del PCB
Il PCB potrà essere realizzato tramite il servizio offerto dalla JLCPCB, azienda che agisce in sinergia con EasyEDA.![]()

Il PCB è di tipo a doppia faccia con fori metallizzati, sotto sono riportate le immagini relative al PCB della BLE Robot board , sia del rendering, realizzati dal programma EasyEDA.

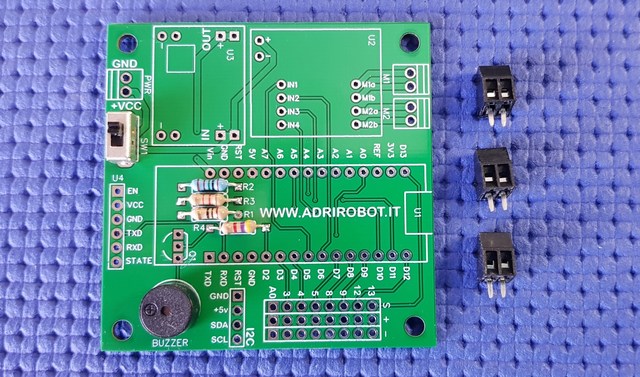
Vista del PCB lato TOP
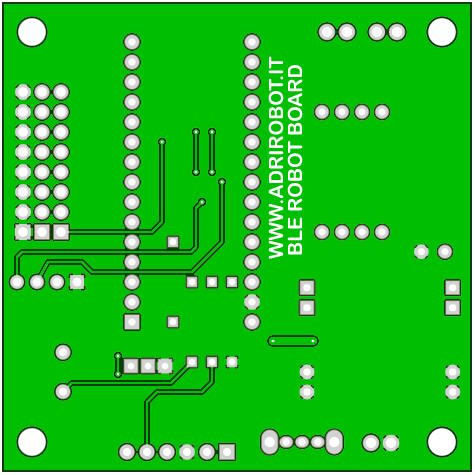
PCB lato BOTTOM
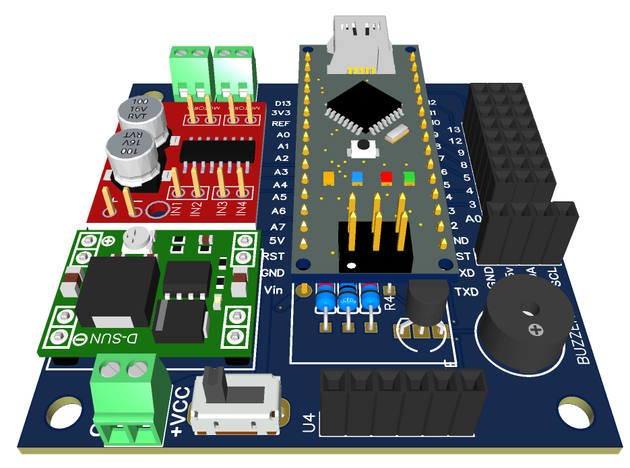
Vista 3D del PCB
Il PCB della BLE Robot board è stato poi realizzato utilizzando il servizio fornito dal sito JLCPCB, il più grande produttore di prototipi di PCB in Asia, che offre prototipi di PCB a rotazione rapida 24 ore su 24, assemblaggio SMT e produzione affidabile di PCB in piccoli lotti.
Il PCB misura 58×86 mm, è a doppia faccia con fori metallizzati
![]()


Il progetto completo può essere scaricato dal mio account presso OSHWLab, utilizzando questo link
Per le fasi di realizzazione vi consiglio la lettura dei seguenti articoli: Come realizzare i vostri PCB tramite il sito JLCPCB e JLCPCB & EasyEDA-Progettazione, realizzazione, assemblaggio PCB
La confezione contenente i PCB in arrivo da JLCPCB

I 5 PCB della scheda
Foto dei cinque PCB ricevuti
Costruzione
L’assemblaggio del PCB è piuttosto semplice. Occorreranno però alcuni strumenti :
- Per la saldatura, si utilizzerà un piccolo saldatore a punta fine, della potenza di circa 25 – 30 W.
- Stagno per saldatura ricavato, per esempio, da un rocchetto di stagno per saldatura con filo diametro 1 mm “lead-free” ovvero senza piombo. Lega composta dal 97% di stagno e 3% di rame;
- Una tronchesina per tagliare i reofori dei componenti dopo la saldatura;
- Opzionale un multimetro per misurare le resistenze in caso di dubbio.
Vedere anche gli articoli:
- Il laboratorio di elettronica – Le attrezzature
- Il laboratorio di elettronica – La strumentazione
- Come eseguire delle buone saldature
- Stazione di saldatura digitale ST50-D 50W.

Saldatore a stilo

Tronchesina

Rotoli di stagno
Fasi di montaggio
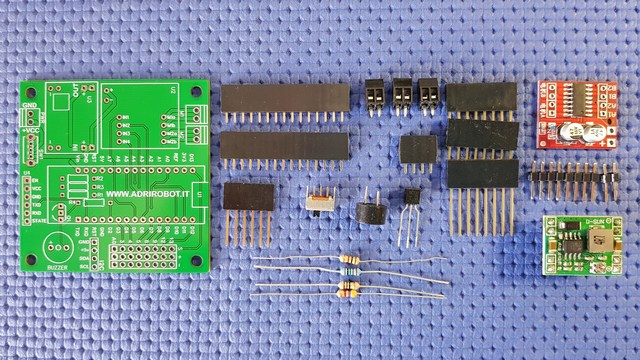
Nelle immagini sotto riportate sono illustrati i passaggi per la realizzazione della BLE Robot board. Si potranno quindi posizionare e saldare i vari componenti seguendo la serigrafia.
Componenti necessari
| ID | Sigla | Descizione | Q.tà |
|---|---|---|---|
| 1 | R1 | 1kΩ ¼ W 5% | 1 |
| 2 | R2 | 2kΩ ¼W 5% | 1 |
| 3 | R3 | 10Ω ¼W 5% | 1 |
| 4 | R4 | 4,7KΩ ¼W 5% | 1 |
| 5 | U1 | BLE-NANO o Nano | 1 |
| 6 | U2 | Modulo MX1508 | 1 |
| 7 | U3 | Modulo DC-DC 1584 | 1 |
| 8 | U4 | Modulo Bluetooth HC-05 | 1 |
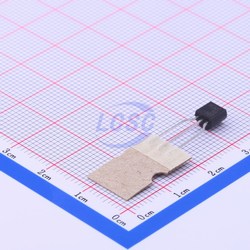
| 9 | Q1 | Transistor BC337 | 1 |
| 10 | BUZZER | Buzzer | 1 |
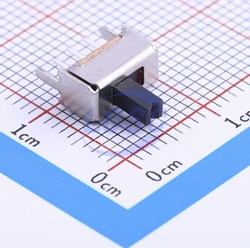
| 11 | SW1 | Interuttore a slitta | 1 |
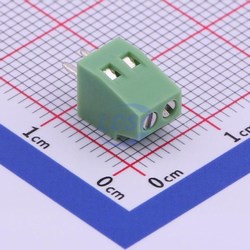
| 12 | M1,M2,PWR | Morsettiera a vite - passo 2.54 mm | 3 |
| 13 | S,+,- | Pin header F 1x8 | 3 |
| 14 | I2C | Pin header F 1x4 | 1 |
Dove trovate alcuno componenti speciali utilizzati
 |
|
 |
 |
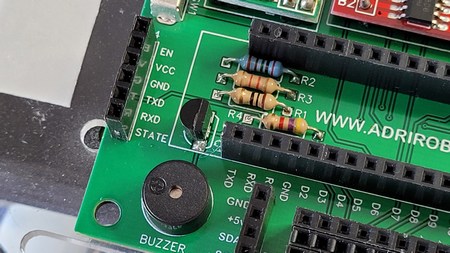
Per il montaggio s’inizierà con le resistenze R1, R2, R3 e R4.
- R1 da 1kΩ: marrone, nero, rosso + un anello di tolleranza oro (5%)
- R2 da 2kΩ: rosso, nero, rosso + un anello di tolleranza oro (5%)
- R3 da 10 : marrone, nero, nero + un anello di tolleranza oro (5%)
- R4 da 4,7 kΩ: giallo, viola, rosso+ un anello di tolleranza oro (5%)

si potrà proseguire saldando l’interruttore di accensione e il buzzer, posizionando il terminale più lungo in corrispondenza del foro con il segno “+”

Possiamo passare alla saldatura delle tre morsettiere a vite, due per i motori e 1 per l’alimentazione verificando che il lato aperto sia posizionato all’esterno del PCB.
passiamo ora alla saldatura del transistor, posizionandolo secondo il disegno della serigrafia.
Lo si deve saldare il più vicino al PCB in quanto il suo corpo dovrà rimanere sotto la scheda controllo.
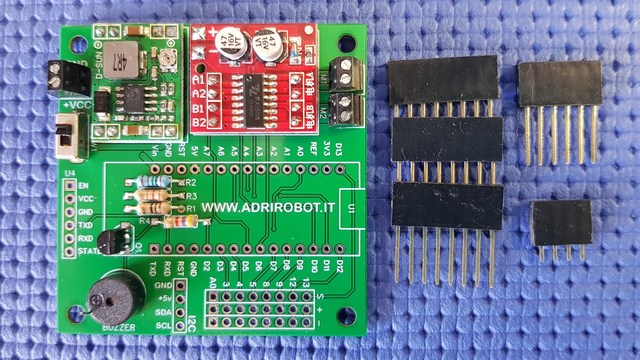
Per il modulo di alimentazione dovremo prima saldare 4 pin strip 2×1.

fatto questo si posizionerà il modulo come riportato sulla serigrafia.

Anche per il modulo controllo motori occorre saldare preventivamente delle pin strip. 1 1×4 e 1 1×2 che permetteranno poi di saldarlo sul PCB.

passiamo ora alla saldature delle 3 pin strip 1×8 che serviranno per collegare sensori e altri moduli.
Abbiamo una pin strip 4×1 per il connettore I2C e una pin strip 1×5 per il posizionamento dell’eventuale modulo Bluetooth.
Saldate le pin strip taglieremo le eccedenze tramite il tronchesino.
 Non resta che saldare le due pin strip 1×15 per il posizionamento della scheda di comando.
Non resta che saldare le due pin strip 1×15 per il posizionamento della scheda di comando.
In questo caso le strip si potranno ricavare da quelle formate di solito da 40 pin, tagliandole con un cutter.

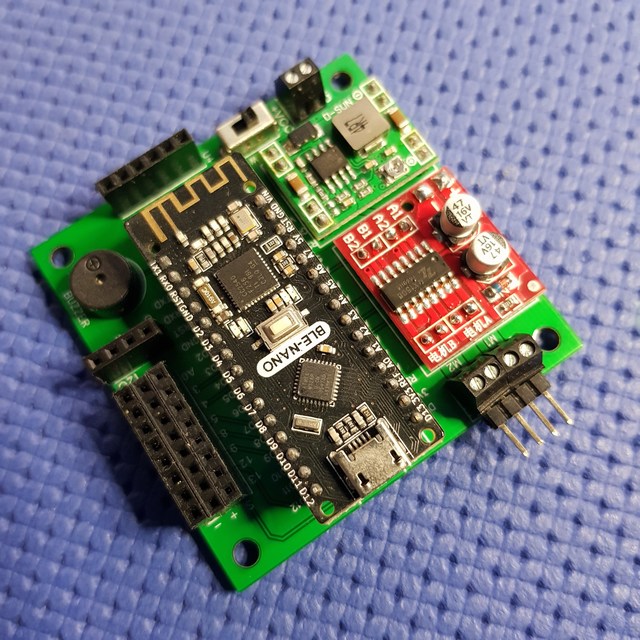
Sotto il montaggio finito, con il posizionamento della scheda controllo BLE-NANO
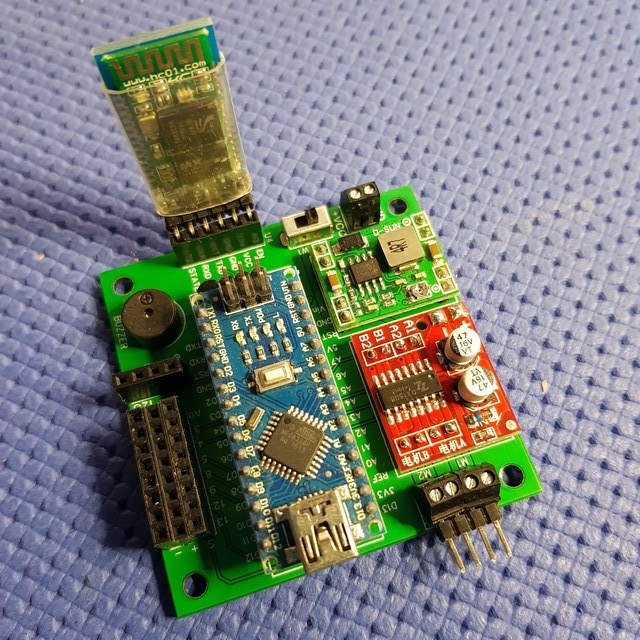
Sotto la versione con una scheda Nano e un modulo Bluetooth BLE AT-09 con CC2541
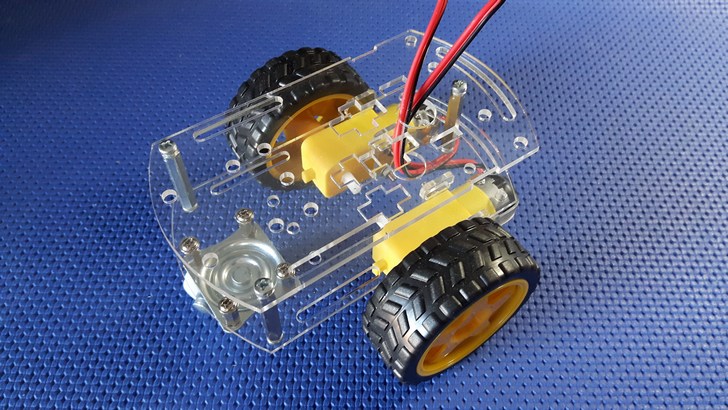
Telaio del robot
La BLE Robot board e il portabatteria sono stati montati su una base robotica. Il kit denominato Arduino 2wd 150mm mini smart robotics car.
Si tratta di una mini base robot che permette di realizzare piccole unità a due ruote motrici, che può essere trovata su vari siti di vendita on-line.
Il telaio è formato da una o più piastre di materiale acrilico trasparente dalla dimensioni di 135mm (L), 75mm (W), 2.7mm di spessore.
Dopo il montaggio, le dimensioni finali saranno di circa 150mm (L), 135mm (W), 60mm (H) minimo
Il kit contiene due piccoli motori DC a magneti permanenti, spazzole di carbone, equivalenti al tipo TGP01D-A130 prodotti dalla ditta di Hong Kong TT. Il rapporto di riduzione del riduttore con ingranaggi di plastica con uscita biassiale è 1:48.
 |
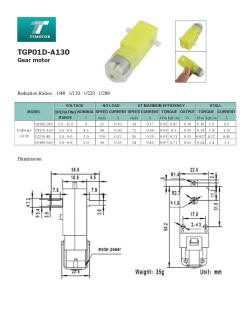 |

Caratteristiche
- Gamma di tensione di funzionamento: 3 ÷ 9 V
- Tensione nominale: 3 V
- Velocità a vuoto: @ 3 V: 110 rpm
- Corrente a vuoto: @ 3 V: 120 mA (0,12 A)
- Corrente di stallo: @ 3 V 450 mA (0,45 A)
- Coppia di stallo: 0.27 kgf·cm (0.027 N·m)
- Dimensioni: 69,2 x 22,5 x 18,8 mm
- Peso circa: 35 g
Per maggiori informazioni e per le istruzioni di montaggio della base del robot vedere l’articolo Arduino 2wd 150mm mini smart robotics car
Altra scheda per robot
E’ disponibile il progetto completo anche di un’altra scheda per il controllo di piccoli robot.
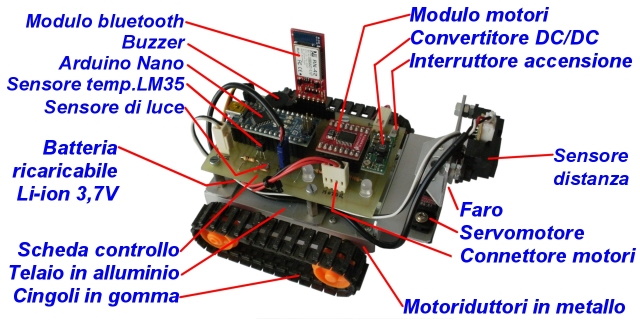
Si tratta della scheda di controllo del Robot LitteBOT.
Alcune sue caratteristiche:
- Alimentazione con modulo elevatore di tensione DC-DC;
- Controller con Arduino Nano;
- Controllo motori con Motor Driver 1A Dual TB6612FNG;
- Buzzer;
- Gestione faro illuminazione;
- Sensore di luce con fotocellula;
- Sensore di distanza con IR GP2D120;
- Connettore per mini servo tipo Hitec HS81;
- Sensore di temperatura con LM35;
- Bluetooth con HC-05.
Per maggiori informazioni vedere LittleBOT – Scheda controllo robot – Costruzione