Il modulo GY-521 è costruito per gestire il sensore MPU-6050 che è un chip prodotto da Invensense, che combina al suo interno più dispositivi tra i quali notiamo:
- accelerometro a 3 assi
- giroscopio a 3 assi
- sensore di temperatura
- oscillare di clock interno
- un processore di movimento digitale
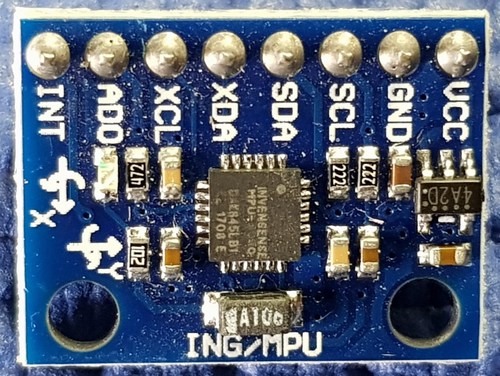
Il modulo è di piccole dimensioni: 21.2 x 16.4 x 3.3 mm, ed è molto preciso, consiste in hardware di conversione da analogico a digitale per ciascun canale, acquisendo allo stesso tempo i canali x, y, z.
L’uscita può essere interfacciata con il bus I2C di Arduino.
Continua a leggere