
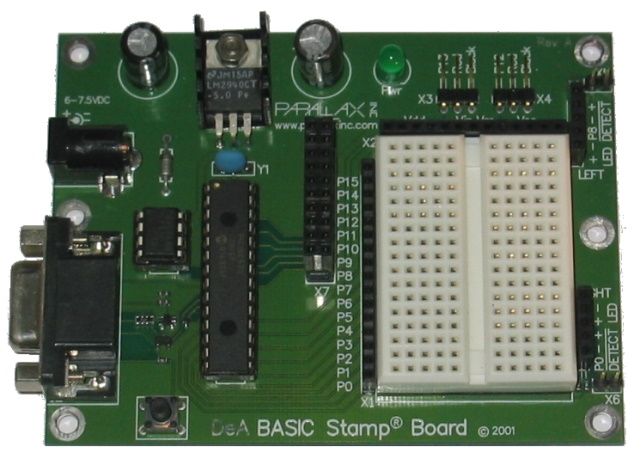
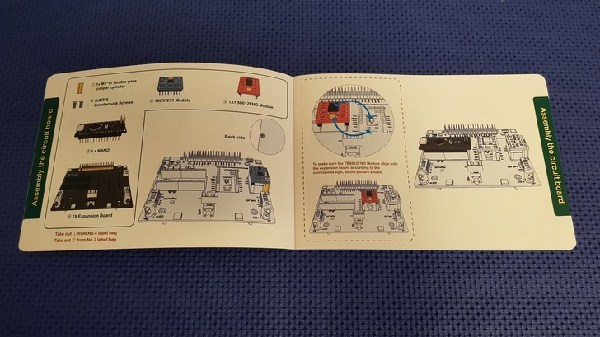
Nel robot la scheda madre DeA BASIC Stamp® Board svolge un ruolo fondamentale nel robot Panettone.
I vari componenti erano allegati ai fascicoli n° 11-12-13-21
Su questa scheda sono raccolti gli elementi che costituiscono Il “cervello elettronico” dei robot. In particolare il chip della memoria, che immagazzina i programmi PBASIC, e il microcontrollore BS/2, che permette al robot dì elaborare le informazioni ed eseguire i programmi presenti in memoria.
Tag: robot
Scheda madre del robot Panettone
Star Wars Costruisci R2-D2 – Schede e Componenti

All’interno del robot R2-D2 sono installate diverse schede e componenti.
Alcune schede sono utilizzate per testare le funzioni del robot stesso.
Segue la panoramica di queste schede, la serie non è al momento completa e sarà aggiornata appena saranno disponibili ulteriori informazioni.

ArduinoBOT Progetto completo del robot
Vediamo in questo articolo il progetto completo del robot ArduinoBOT. Il robot di tipo esploratore è basato sulla Scheda di controllo Arduino UNO, per muoversi utilizza due ruote in ABS azionate da due motoriduttori che sono comandati (nel primo prototipo) da una scheda che utilizza L293 auto costruita , mentre nella versione definitiva da una scheda motor shield.

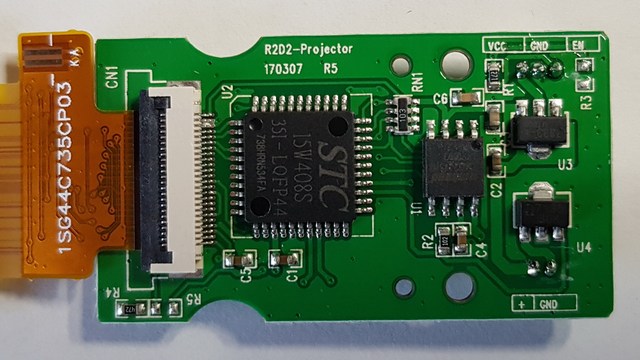
Star Wars R2-D2 – Proiettore olografico primario
Il proiettore olografico primario installato all’interno di R2-D2 permette la proiezione degli “ologrammi”. Sono generati da uno schermo digitale controllato da un circuito stampato dedicato, fornito con il fascicolo n°27. Il display è montato alle spalle dell’obiettivo dell’obbiettivo regolabile del proiettore.
Elettronica Open Source – articoli di adrirobot
Dal luglio 2013 collaboro con il blog online Elettronica Open Source, per cui ho scritto 20 articoli (alcuni presenti anche in 6 raccolte) che hanno come argomento la robotica o elettronica.
Tra i vari progetti realizzati e descritti negli articoli su Elettronica Open Source si trovano quelli per la costruzione di 3 robot, sul sito trovate le istruzioni per realizzarli
 adriBOT adriBOT |
 RoboYún RoboYún |

Star Wars R2-D2 – Piano dell’opera
In questo articolo è presente il piano dell’opera “STAR WARS: Costruisci il tuo R2-D2”.
L’opera vede la luce nei primi giorni del mese di novembre 2017, all’inizio STAR WARS Costruisci R2-D2, era disponibile il pre-ordine solamente on-line, dal 30 dicembre 2017 fu possibile acquistarla nelle edicole.
L’opera “STAR WARS: Costruisci il tuo R2-D2” è composta da 100 uscite
La prima uscita al prezzo di 1,99€, la seconda uscita al prezzo di 5,99€; per ogni numero successivo il prezzo è di 12.99€ ciascuno

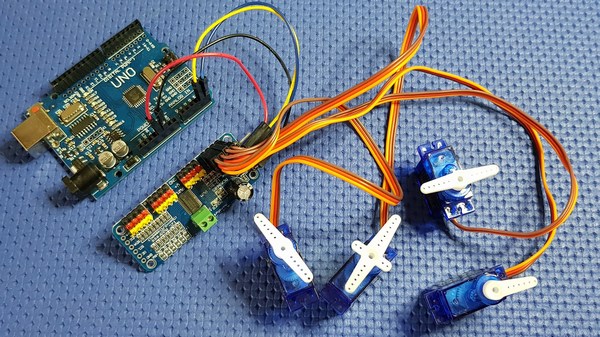
Moduli per controllo multiplo di servomotori
I servomotori sono molto utilizzati nel campo della robotica. Il problema è il numero di pin necessario, per esempio controllare 8 servo con Arduino significa dedicare 8 pin digitali della scheda. Questo riduce a soli 4 pin digitali utilizzabili per il vostro progetto, considerando che eliminiamo anche i pin Tx e Rx.
Per risolvere questo problema possiamo utilizzare dei particolari moduli che permettono il controllo multiplo di servomotori. Il comando del singolo servo viene fatto tramite un comando inviato tramite per esempio sulla linea seriale o I2C. Vedete anche l’articolo Realizzare un servo tester con Arduino
I link rimandano ai vari articoli in cui i moduli sono descritti con relativi progetti.
Montaggio del Robot Tumbller di Elegoo
Dopo aver visto la presentazione del robot Tumbller di Elegoo nel precedente articolo Kit per Robot Tumbller da Elegoo vediamo adesso le fasi di montaggio.
Il montaggio del robot è molto semplice e richiede per chi ha un po’ di manualità non più di un’ora, basterà seguire le istruzioni riportate sul manuale presente all’interno della confezione.
Per il montaggio del robot Tumbller Elegoo si utilizzerà principalmente il cacciavite tipo Phillips (“a croce” o “a stella”) presente anch’esso nella confezione, se avete una piccola pinza in alcune fasi, queste aiuteranno a mantenere salde le parti da fissare.
Consiglio di sistemare le varie parti in modo ordinato sul tavolo in modo da facilitarne la ricerca.
Base per robot – Dagu Rover 5 chassis cingolato
Robot kitgu Rover 5 chassis cingolato è una base per la costruzione di robot semoventi prodotta dalla DAGU Hi-Tech Electronic Robotics , si tratta di di uno chassis cingolato progettato specificamente per gli studenti e hobbisti.
A differenza dei telai tradizionali la posizione dei riduttori può essere regolata ruotandoli con incrementi di 5 gradi, i cingoli realizzati in gomma mantengono in tensione il battistrada.
Il telaio è realizzato tramite un robusto corpo in plastica bianca, con al centro lo spazio per alloggiare un porta batteria (incluso) e l’elettronica di controllo.
Dispone di due moto riduttori con la possibilità di essere forniti con un encoder ottico in quadratura che fornisce 1000 impulsi per 3 giri dell’albero.
Come detto, una caratteristica unica del Dagu Rover chassis cingolato è la possibilità di variare la sua altezza di circa 3,8 cm.
Le dimensioni esterne del telaio sono circa 24 cm di lunghezza, 23 cm di larghezza e 7,5 cm di altezza nella sua configurazione appiattita (con la parte anteriore e i moto riduttori posteriori montati con un angolo di 180° tra loro).
Per completarlo e renderlo funzionante basta aggiungere un controller per i motori, dei sensori a scelta e le batterie. La confezione comprende anche un piccolo cacciavite a croce e una chiave a brugola per la modifica della posizione delle ruote. Esistono più versioni: con 2 o 4 motori con e senza encoder. Continua a leggere
- 1
- 2
PCB a partire da 2$ per 5 pezzi
