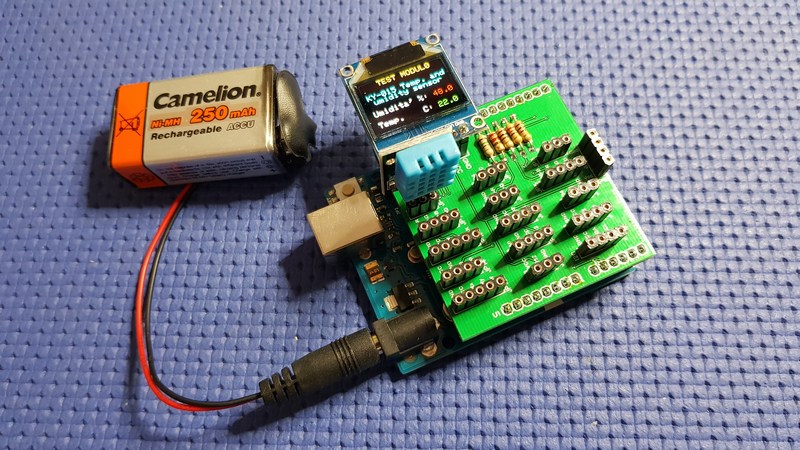
Testiamo il modulo sensore KY-015 (DHT11) Temperature and humidity sensor module utilizzando il Multi Test Shield. I valori saranno riportati sul display OLED da 0.95″risoluzione 96×64 pixel.
![]() Citazione dell’articolo nelle sezioni ARDUINO, BRIEF TUTORIAL del Blog di Elettronica In
Citazione dell’articolo nelle sezioni ARDUINO, BRIEF TUTORIAL del Blog di Elettronica In